Otáčky motora je možné riadiť:
- zmenou odporu v obvode kotvy zapojením prídavného odporu
- zmenou magnetického toku vplyvom zmeny budiaceho prúdu (táto možnosť sa vylučuje použitím motora s pernamentnými magnetmi)
- alebo zmenou svorkového napätia.
Zmenu svorkového napätia umožňujú polovodičové meniče. Práve zmenou napätia sa dosahuje vysoká účinnosť regulácie a malé straty. Konštrukcia výkonových meničov za posledné desaťročie prekonala výrazné zmeny. Do výroby sa začali nasadzovať priemyselné roboty. Tieto roboty vzhľadom na svoj charakter činnosti, vyžadujú také pohony, ktoré sú schopné zabezpečiť čo najvyššiu dynamiku. Preto sú roboty osadzované jednosmernými motormi a motormi špeciálnej konštrukcie, s veľmi nízkym momentom zotrvačnosti.
Jednosmerné motory sa vyznačujú jednoduchou riaditeľnosťou otáčok a spoľahlivosťou. V spojení s meničom musia umožniť plynulú zmenu otáčok, prípadne reverzácie, zmenou svorkového napätia. Túto zmenu umožňujú napäťové meniče. Vďaka tranzistorovej štruktúre a použitiu vhodnej spínacej modulácii dosahujú veľmi dobrú účinnosť a riaditeľnosť.
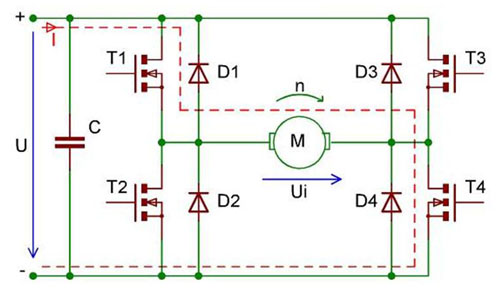
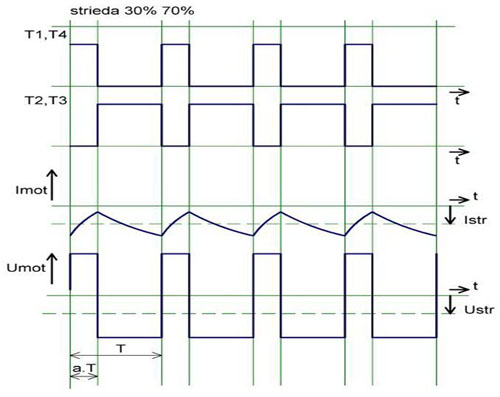
Moderné elektrické pohony spolu s meničom musia pracovať vo všetkých štyroch kvadrantoch charakteristík moment - otáčky. Štvorkvadrantový menič (předchozí obr.) umožňuje jednoduché riadenie jednosmerných motorov. Šírkovou impulznou moduláciou (PWM) mení efektívnu hodnotu výstupného napätia. Jeho jednoduchá konštrukcia zapojená do plného mostu (H-Bridge) umožňuje meniť veľkosť, smer otáčok a brzdenie. Jedno z možných riadení takéhoto typu meniča je znázornené na nasledujícím obrázku.
Po ich vypnutí sa prúd začne uzatvárať nulovými diódami D1, D4. Tento dej sa cyklicky opakuje. Medzi zopnutím jednej dvojice tranzistorov T1, T4 a T2, T3 je ochranná doba (približne 1ms), ktorá nám vylúči súčasné zopnutie všetkých štyroch tranzistorov, čo by malo za následok skratu. Tento spôsob riadenia sa používa u pohonoch s malým výkonom. Jej prednosťou je jednoduchá realizácia riadiaceho systému a neexistuje zóna necitlivosti.
Privedené napätie na kotvu má však premenlivé znamienko, čo môže v niektorých prípadoch spôsobovať pulzovanie momentu motora. Okrem toho vznikajú tepelné straty v železe i medi, lebo pri striede 1:1 je efektívna hodnota prúdu nenulová. Experimentálne bola overená funkčnosť štvorkvadrantového meniča s napäťovým charakterom, ktorého bloková štruktúra je znázornená na dalším obrázku.
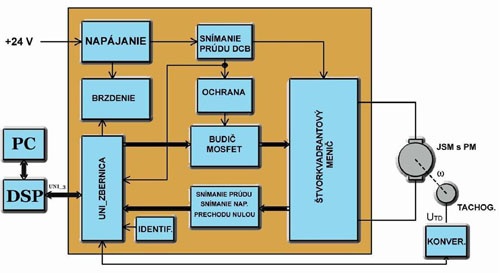
Menič je napájaný zo zdroja jednosmerného napätia 24V a prúdová zaťažiteľnosť je požadovaná desiatky ampérov. Celá konštrukcia je rozdelená do funkčných blokov. Skladá sa zo štvorkvadrantového meniča zapojeného do plného mostu, ktorým napájame jednosmerný motor s pernamentnými magnetmi. Výkonové tranzistory budíme budičom MOS FET. Budič je navyše vybavený vstupom ochrany, ktorý ma za úlohu blokovať riadiace signály v prípade prekročenia maximálneho prúdu.
Blok napájania stabilizuje jednotlivé napätia pre napájanie jednotlivých blokov a zároveň oddeľuje digitálnu zem od analógovej. V prípade aktívneho brzdenia, alebo rýchlej reverzácie otáčok motora dochádza k rekuperácii energie spätne do napájacieho zdroja. To spôsobuje neželané zvýšenie napätia na kondenzátoroch zdroja napájania. Z tohto dôvodu je menič vybavený brzdiacim odporníkom. Z mostíka snímame prúdy, napätia a prechody nulou, ktoré sú potrebné pre spätné slučky regulácie. Všetky vstupné a výstupné signály sú vyvedené na spoločnú zbernicu UNI_3. Ňou je menič prepojený s DSP (digitálny signálový procesor).
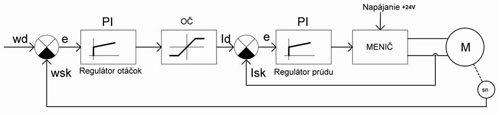
Moderný menič musí pracovať spoľahlivo a jeho bezpečnosť je zabezpečená blokmi ochrany a identifikácie. Na meniči bola overená regulácia na požadované otáčky. Z tohto dôvodu bol použitý ako snímač otáčok tachogenerátor a konvertor pre napäťové prispôsobenie. Štruktúra elektrického pohon pre reguláciu rýchlosti musí byť riešená tak, aby pri zmene záťažného momentu motor vytvoril požadovaný dynamický moment. Smer tohto momentu určuje regulačná odchýlka rýchlosti. Pri regulácii nesmie dôjsť k prúdovému preťaženiu kotvy. Ochrana napájacích zdrojov musí zamedziť prekročeniu prípustnej hodnoty prúdu. Toto nám zabezpečuje prúdová spätná väzba s príslušným regulátorom.
Na následujícím obrázku je uvedená funkčná bloková schéma kaskádneho riadenia. Má sériové zapojenie regulačných obvodov s podradenou prúdovou slučkou. Maximálna prípustná hodnota prúdu je nastavená obmedzovacím členom OČ na výstupe nadriadenej rýchlostnej slučky, ako žiadaná hodnota prúdu.
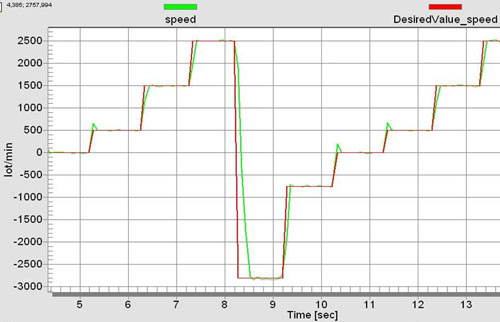
Ako riadiaci systém bol požitý digitálny signálový procesor od Freescale pod označením DSP56F805, v ktorom je obsiahnutý celý riadiaci softvér vrátane PI regulátorov. Výkonovú časť tvorí menič, motor a pracovný mechanizmus. Na následujícím obrázku je uzavretá slučka kaskádného riadenia a reakcia otáčok regulovaného pohonu na skokové žiadané otáčky.