
Krokový motor je bezkartáčový stejnosměrný motor, u nějž je otáčka rozdělaná na daný počet kroků, vycházející z konstrukce motoru. Typicky je celá otáčka hřídele o 360° rozdělená na 200 kroků, což znamená, že při jednom kroku se hřídel pootočí o 1,8°. Dostupné jsou rovněž motory, u nichž se provede krok hřídele o 2; 2,5; 5, 15 nebo 30°.
Popisovanou funkci lze získat díky speciální konstrukci krokového motoru, o čem bude řeč v další části textu. Jelikož je jedna otáčka hřídele rozdělená na jisté diskrétní úseky, neotáčí se krokový motor plynule, ale provádí kroky a překonává mezistavy, proto práci krokového motoru provází charakteristický zvuk a vibrace.


Současné řadiče krokových motorů se realizují na základě číslicových obvodů, které ovládají drivery zvyšující zatížitelnost výstupů. Obvykle v takovém řadiči najdeme mikrokontrolér, i když ne vždy, jelikož bez větších obtíží lze takový řadič sestavit z hradel a klopných obvodů. Způsob řízení motoru samotný závisí na jeho druhu, počtu fází a na tom, zda probíhá se zpětnou vazbou nebo bez ní. U některých řadičů lze proud protékající vinutím regulovat pomocí průběhu PWM, přičemž směr otáčení a řízení kroků se provádí pomocí pravoúhlých průběhů. Máme-li co do činění s konkrétním modelem motoru a jeho řadičem, je třeba pro definování správné metody řízení sáhnout po jejich katalogových listech.
Vinutí, která jsou zátěží výstupů řadiče, jsou cívky vyznačující se jistou indukčností a kapacitou. Jejich reaktance roste spolu s růstem kmitočtu, což omezuje protékající proud a limituje maximální kmitočet přepínání. Vybíráme-li motor pro konkrétní aplikaci, je vždy třeba zvážit určité kompromisy, jako na příklad maximální úhlovou rychlost a požadovaný točivý moment ve vztahu k rozlišení. V článku jsou uvedeny základní informace na téma principu funkce bipolárních a unipolárních krokových motorů a o tom, čemu je třeba věnovat při výběru motoru pro danou aplikaci pozornost.
Krokový motor – jak funguje?
Krokový motor je složen z rotoru a statoru. Stator je nepohyblivá část, rotor usazený na hřídeli v ložiscích rotuje v závěsu za rotujícím magnetickým polem vytvořeným kolem statoru. Stator – vyrobený z oceli nebo jiného kovu – je kostrou pro sadu elektromagnetů, což jsou cívky osazené v definovaných místech kolem dokola rotoru. Když cívkami statoru protéká proud, vzniká kolem nich magnetické pole. Jednotlivé magnetické toky mají směr a intenzitu závislou na velikosti a směru proudu tekoucího danou cívkou.
Je-li cívka napájená, vzniklý elektromagnet přitahuje magnet (zub) instalovaný na rotoru, posunutý ve vztahu k němu o jistý offset. Pak se rotor spolu s hřídelí otáčejí o úhel, při kterém jeho poloha klade nejmenší odpor magnetickému toku nebo výslednici mnoha toků. Po přemístění o tento offset se zapíná další elektromagnet (cívka nebo cívky) na statoru a rotor je opětovně přitahován do nové polohy. Přepínáním dalších cívek lze provádět další kroky vpřed nebo vzad nebo získat úplnou nebo částečnou otáčku rotoru a spolu s ním hřídele.
Vyjdeme-li z uvedeného popisu, můžeme si krokový motor představit jako řadu elektromagnetů, které přitahují magnetu rotoru. Ve skutečnosti je však situace mnohem složitější, jelikož magnet je přitahovaný výsledným polem vznikajícím kolem sady elektromagnetů, což umožňuje nejen práci v režimu celého kroku, ale rovněž půlkroku (podělení kroku dvěma) nebo méně, což je označováno jako práce v režimu microstep.
Krokový motor - práce v režimu celého kroku
Princip práce krokového motoru v režimu celého kroku je ilustrován na Obrázku 1. V tomto režimu se motor otáčí o úhel daný jeho konstrukcí, který může být např. 1,8°. Jak lze snadno spočítat, je v takovém případě nutné provést pro úplné pootočení 200 kroků (200×1,8°=360°).
Krok hřídele se provede po napájení jedné nebo dvou cívek. Práce s napájením jedné cívky vyžaduje minimální výkon driveru. Při dvoufázové práci, napájení cívek ležících naproti sobě, je požadován dvakrát větší výkon napájecího proudu, ale za to roste také rychlost a kroutící moment.
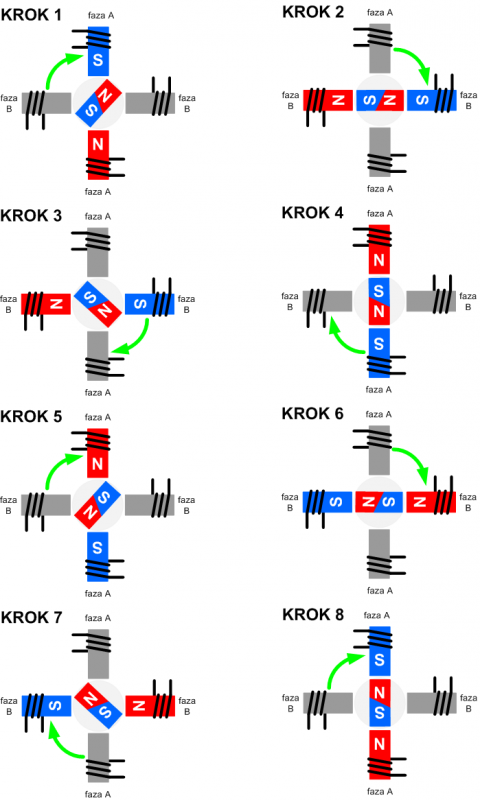
Obrázek 1. Princip funkce motoru v režimu celého kroku při dvoufázovém napájení
Krokový motor - práce v režimu půlkroku
Princip práce motoru v režimu půlkroku je uvedeno na Obrázku 2. Jak naznačuje název samotný, v tomto režimu se diskrétní krok rotoru dělí dvěma a po provedení jednoho kroku se vrací o polovinu jmenovitého úhlu. Vztáhneme-li toto na příklad uvedený výše, jeden krok se provede o 0,9°, počet kroků na celou otáčku vzroste na 400.
Při práci v režimu půlkroku je vyžadováno střídající se napájení dvou fází (cívek). V důsledku toho vzroste točivý moment v porovnání s prací při jednofázovém napájení, práce motoru je “hladší” a fázové rozlišení se zdvojnásobí.
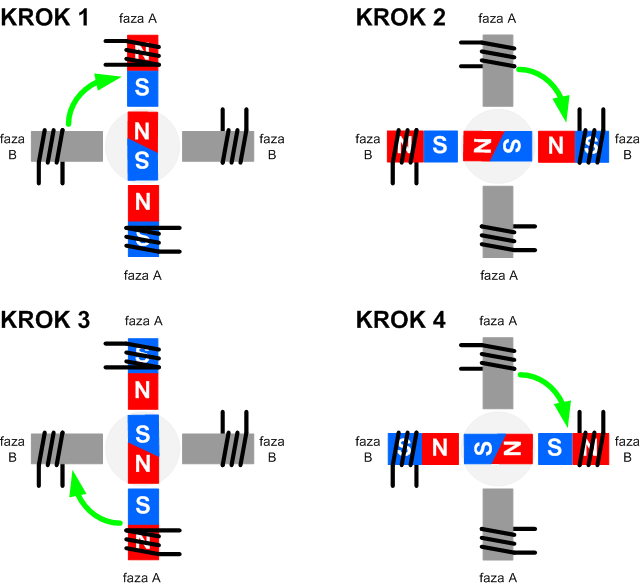
Obrázek 2. Princip funkce motoru v režimu půlkroku při dvoufázovém napájení
Krokový motor - práce v režimu microstepu (mikrokroku)
V režimu microstepu se jmenovitý krok dělí na ještě kratší úseky než při práci v režimu půlkroku. Maximální koeficient dělení je 256. Jednotlivé polohy rotoru se získávají pomocí výsledného magnetického toku cívek napájených schodovitým průběhem. Práce v režimu mikrokroku je preferována v těch aplikacích, u nichž je vyžadována “hladká” práce motoru a/nebo velká přesnost jeho polohování.
Při použití motoru v režimu mikrokroku je třeba věnovat pozornost požadavkům aplikace, co se týká rychlosti otáčení motoru. Jak bylo uvedeno, indukční reaktance cívky roste spolu s kmitočtem klíčování proudu ve vinutích motoru. Větší rychlost otáčení vyžaduje častější přepínání a v důsledku toho větší kmitočet klíčování vinutí. To způsobuje vzrůst impedance cívky a tím pokles středního proudu tekoucího vinutím. To není nevýznamné pro práci motoru – spolu s poklesem proudu tekoucího vinutími se snižuje také kroutící moment, což může vést k oscilacím, zastavení rotoru nebo ztrátě kroků motoru a tím poháněného elementu stroje. Proto je třeba při použití motoru v režimu mikrokroku věnovat zvláštní pozornost jeho katalogovému listu, ve kterém by měla být vykreslena závislost kroutícího momentu jako funkce kmitočtu proudu tekoucího cívkou.
Typy krokových motorů
Krokový motor není ve srovnání s typickým kartáčovým stejnosměrným motorem zvlášť komplikovaný a konstrukčně složitější, ale vyžaduje větší preciznost provedení. Velkou podobnost ke krokovým motorům s permanentním magnetem vykazují současné motory BLDC, které mají navíc velmi podobné řízení.
Podle základního kritéria se typy krokových motorů dělí z hlediska způsobu konstrukce a počtu fází požadovaných pro napájení cívek. V závislosti na konstrukci se jednotlivé typy liší určením (cílovou aplikací), rozlišením a dosahovaným kroutícím momentem.
Krokový motor s trvalým magnetem
Motor s permanentními magnety by mohl mít dvě cívky (elektromagnety), které by tvořily čtyři střídavé póly, a rotor motoru by byl namagnetován radiálně. Změna polohy rotoru by spočívala ve změně směru průtoku proudu v cívkách, což by způsobovalo změnu magnetických pólů. Při vhodné změně směru proudu by se rotor pootočil o 90°. Jednotlivý krok takového motoru, přestože by mohl být v jistých aplikacích užitečný, by byl velmi velký a málo přesný. Proto v realitě mají motory s permanentními magnety více pólů rotoru a pro zvýšení počtu kroků a přesnosti polohování je na jejich rotoru nainstalováno několik magnetů.
Obvykle mají krokové motory s permanentními magnety krok od 7,5° do 15°, což dává 48 až 24 kroků na jednu otáčku. Namagnetované póly rotoru ovlivňují zvýšení magnetické indukce, proto se motory s permanentními magnety vyznačují velkým kroutícím momentem. Nesložitá konstrukce se projevuje přiměřenou cenou motoru při spíše nevelkém rozlišení.
Krokové motory s proměnlivou reluktancí
Motory s proměnlivou reluktancí byly jedněmi z prvních modelů krokových motorů. V současnosti se s nimi setkáváme spíše řidčeji a méně se používají. U tohoto typu motoru je rotor složen z mnoha zubů vyrobených z měkkého železa. Jsou-li cívky rotoru napájené stejnosměrným proudem, je zub rotoru přitahován magnetickým polem. Díky sekvenčnímu přepínání se rotor otáčí o úhel vycházející z konstrukce motoru.
Motory tohoto typu, i když nejsou konstrukčně složité a snadno se řídí, mají nevelké rozlišení a malý kroutící moment.
Hybridní krokový motor
Hybridní krokový motor je jedním z typů krokových motorů nejčastěji používaných v průmyslu. Vyznačuje se velkým rozlišením – jeho rotor provádí kroky od 0,9° do 3,6° (400 až 100 kroků). Tento typ motoru převyšuje ostatní z hlediska spolehlivosti, kroutícího momentu, přídržného momentu a dosahované rychlosti otáčení.
Rotor hybridního rotoru je složen z permanentních magnetů, ale na rozdíl od výše popisovaných motorů s permanentním magnetem nejsou namontovány radiálně, ale namagnetovány axiálně. Rotor se typicky skládá ze dvou prstenců namagnetovaných s opačnou orientací, nasazených na hřídel motoru. Každý z prstenců má vyřezané drážky, které tvoří zuby rotoru.
Unipolární a bipolární motory
Jiné rozdělení krokových motorů vychází ze způsobu provedení vinutí u dvoufázových motorů. V závislosti na něm se motory dělí na unipolární a bipolární. Hlavní rozdíl spočívá v tom, že unipolární motor pracuje s jednou polaritou proudu (napětí), zatímco bipolární motor se dvěma polaritami, což znamená, že směr průtoku proudu cívkou je střídavý. Další rozdíl spočívá v nutnosti provedení spojení cívek motoru tak, aby bylo možné předávání napájení z konce jedné cívky na začátek druhé. Takový způsob spojení dovoluje použít proud (napětí) jedné polarity. Rozdíly v konstrukci obou druhů motorů jsou zjednodušeně zobrazeny na obrázcích 3 a 4.
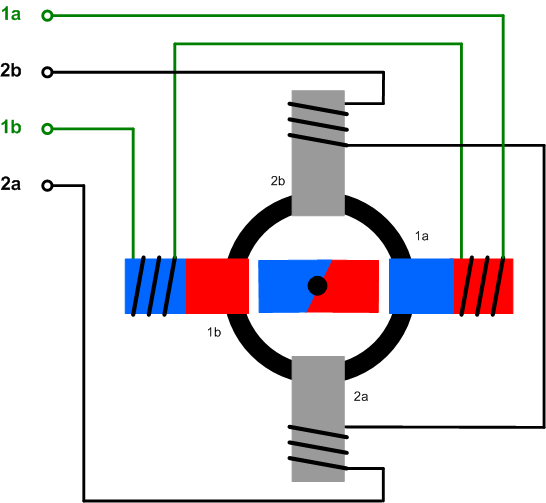
Obrázek 3. Bipolární motor a způsob propojení jeho vinutí
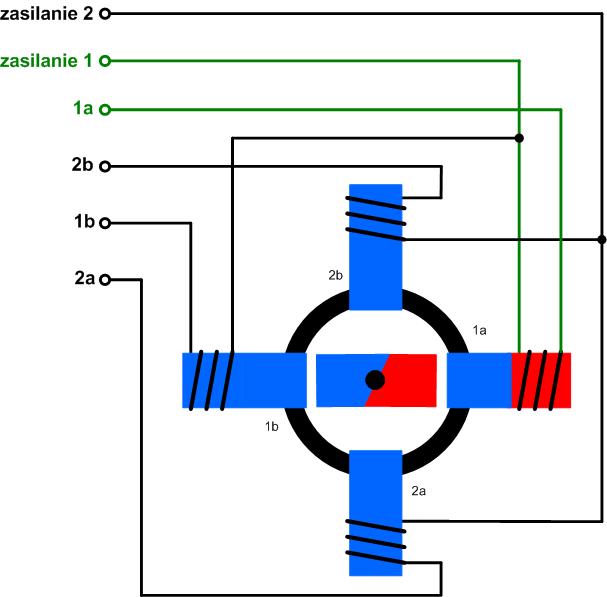
Obrázek 4. Koncepční výkres unipolárního motoru a způsob propojení jeho vinutí
Bipolární motor mě větší kroutící moment než unipolární motor, i když je to za cenu složitějšího řízení.
Nedostatky a přednosti krokových motorů
Základními přednostmi krokového motoru jsou přesnost funkce, snadnost řízení polohy rotoru a jeho rychlosti otáčení. Toho lze dosáhnout při poměrně nikoliv složité konstrukci a nízké ceně hotového řešení. Kroutící moment je velmi velký při malé rychlosti otáčení. V konstrukci motoru nejsou kartáčky, což se projevuje jeho velkou mechanickou trvanlivostí a vzrůstem spolehlivostí. Jinou důležitou vlastností je snadnost řízení motoru: rychlý start díky velkému kroutícímu momentu, snadné zastavení díky malému momentu setrvačnosti a možnost rychlé změny směru otáčení. V mnoha aplikacích má velký význam snadnost tvarování charakteristiky startu a zastavení.
Jedním z nejdůležitějších nedostatků krokového motoru je jeho potřeba energie. Motor vyžaduje napájení jak v okamžiku provedení pohybu, tak i během zastavení. Kroutící moment motoru je největší při relativně malé rychlosti otáčení a klesá při velké. Jak bylo uvedeno dříve, silně souvisí s velikostí proudu tekoucího cívkami a ten pak závisí na jejich impedance, která vzrůstá s vzrůstem kmitočtu přepínání. To je důvod, kvůli kterému nelze dosáhnout velké rychlosti otáčení při zachování kroutícího momentu a schopnosti motoru “uzvednout” danou zátěž.
Není-li kroutící moment dostatečný, pak dochází k jevu zvanému prokluz nebo ztráta kroků. Proto je pro spolehlivé řízení motoru vyžadován mechanismus zpětné vazby, která může být provedena např. na základě enkodéru nebo jiného čidla. Díky němu se může kontrolér motoru “ujistit”, že motor provedl požadovaný počet kroků.
Řízení krokového motoru
Dobrou praxí konstrukce pohonů je zohlednění celé sestavy, to je motoru včetně řadiče, jelikož nelze uvažovat o vlastnostech celého obvodu pohonu bez zohlednění parametrů jak jednoho, tak i druhého. Zjednodušeně lze říci, že ani nejlepší motor nebude pracovat správně bez příslušného řadiče a naopak. Výběr sestavy motor + řadič bude zásadním způsobem ovlivňovat charakteristiku obvodu pohonu.
Hlavní trend vývoje krokových motorů směřuje ke zmenšování setrvačnosti motoru při současném zvyšování rozlišení (počtu kroků), kroutícího momentu a energetické účinnosti. Proto se v praxi, kromě výše vyjmenovaných druhů motorů, můžeme setkat s mnoha jejich modifikacemi, jejichž cílem je dosažení zlepšení výše uvedených parametrů. Jednotlivé motory se v závislosti od použití liší též počtem vinutí a v důsledku toho algoritmem řízení.
Na internetu lze nají mnoho projektů řadičů krokových motorů, od konstrukčně nejsnadnějších, vybavených potenciometrem pro nastavení rychlosti otáčení a tlačítkem pro změnu směru otáčení či tlačítkem start/stop, postavených s využitím diskrétních součástek, jako jsou hradla, klopné obvody a tranzistorové klíče, až po velmi složité, sestavené na základě speciálních integrovaných obvodů driverů a procesoru DSP. Zdá se však, že se takové projekty hodí spíše pro stavbu neprofesionálních nebo experimentálních zařízení než na příklad pro použití v průmyslu. Zde raději sáhneme po hotových řešeních prověřených výrobců.
Při neprofesionálním použití se dá nejsnadněji postavit řadič motoru na základě Arduina a vhodného proudového zesilovače nebo driveru motoru. Výběr desky - modulu rozšíření – bude záviset na použitém motoru.
U bipolárního motoru je třeba zajistit možnost průtoku proudu ve dvou směrech. Proto je potřeba pro změnu směru magnetického toku v jádru použít jednotlivý dvoustavový přepínač sestavený ze střídavě spínaných tranzistorů (obvod polomůstku). Při řízení unipolárního motoru je třeba zajistit průtok proudu daným vinutím pouze v jednom směru, stačí tedy použít jeden klíčovací tranzistor na cívku. Jak si lze snadno všimnout, unipolární řízení vyžaduje menší počet tranzistorů klíče, ale jak si pamatujeme z dřívějšího výkladu, v daném okamžiku pracuje pouze polovina vinutí, vytváří tedy sám unipolární motor menší kroutící moment než bipolární motor. Snadno si lze všimnout, že unipolární řízení vyžaduje menší počet klíčovacích tranzistorů, ale jak si pamatujeme z dřívějšího výkladu, v daném okamžiku pracuje pouze jedna polovina vinutí, a tedy vytváří unipolární motor menší kroutící moment než bipolární motor. Bipolární motor vyžaduje tedy rozsáhlejší řídicí obvod, ale mnoho výrobců polovodičů nabízí speciální integrované obvody, které obsahují dva kompletní tranzistorové můstky, obvody chránící před přehřátím, přetížením a přepětím a také logická hradla zjednodušující řízení samotného obvodu. Takové integrované obvody lze nalézt v portfoliu STM, Toshiba Electric a dalších.
Řízení v režimu půlkroku nebo mikrokroku je značně složitější. Vyžaduje totiž vhodnou manipulaci s jednotlivými magnetickými toky tak, aby výsledné pole způsobilo změnu polohy rotoru ne o celý krok, ale o jeho jistou část.
Na závěr
V současnosti se krokové motory používají v mnoha různých zařízeních, která vyžaduji precizní řízení pohybu a přesné určení polohy. Proto nachází uplatnění hlavně v aplikacích, které vyžadují přesné řízení přemístění, polohovacích zařízeních, jelikož pomocí počítače a řadiče lze snadno vytvořit vhodné zařízení a software. Široce se též používají v biomedicínských přístrojích, pohonech počítačových disků, tiskárnách, skenerech, inteligentním osvětlení, pro řízení objektivů kamer, polohy regulačních prvků ve spalovacích motorech, v robotice, 3D skenerech a tiskárnách, XY plotterech, CNC strojích a jiných zařízeních. Z populárních zařízení, v nichž se bohatě používají krokové motory, lze jmenovat tiskárny: od starších modelů jehličkových tiskáren až po moderní a mající málo společného s tradičním tiskem 3D tiskárny.
Aplikace krokových motorů jsou v současnosti velmi dobře známé a nikoliv obtížné k použití rovněž pro kutily, kteří s jejich využitím vytvářejí na příklad amatérské CNC obráběcí stroje nebo 3D tiskárny. Krokový motor lze snadno řídit pomocí Arduina s vhodným přístavkem (např. shieldem s integrovaným obvodem L293D). Otevírá to široké možnosti pro stavbu mnoha zajímavých aplikací, které mohou nalézt využití v různých oblastech průmyslu, domácnosti nebo domácí dílně.
Článek vyšel v originále na webu TME.eu:
https://www.tme.eu/cz/en/news/library-articles/page/41861/stepper-motors-stepping-motors-types-and-applications/



