
Tento článek uvádí důležité aspekty návrhu systému s multi-konstelačními GNSS přijímači a představí GNSS platformy od u-blox , Microchip Technology , MikroElektronika, Thales a Arduino. Snížení spotřeby u technologie GNSS přispělo k většímu využití GNSS technologie v aplikacích pro inteligentní města. Ze spotřeby 120 mW v roce 2010 se podařilo dosáhnout hodnoty 25 mW v roce 2020 (obrázek 1). Ve skutečnosti spotřeba energie klesala rychleji než spotřeba energie většiny ostatních komponent lokalizačního systému. Starší technologie GNSS byly ve srovnání s ostatními prvky systému energeticky náročné. Dnes spotřeba energie přijímače GNSS představuje pouze jednociferné procento celkové energie systému.
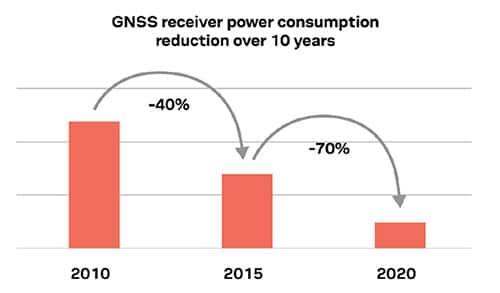
Obrázek 1: Spotřeba energie přijímače GNSS klesla ze 120 mW v roce 2010 na 25 mW v roce 2020. (Zdroj obrázku: u-blox)
Problémy se spotřebou energie
Ne každý návrh lokalizačního systému potřebuje průběžné odhady polohy nebo vysokou úroveň přesnosti polohy. Při návrhu lze využít různé nástroje pro optimalizaci výkonu a spotřeby energie, včetně optimalizace hardwaru. Použití součástek s nízkou spotřebou, zejména nízkošumových RF zesilovačů (LNA), oscilátorů a hodin reálného času (RTC), je prvním krokem ve vývoji energeticky účinných řešení GNSS.
Volba mezi aktivní a pasivní anténou je dobrým příkladem úspory energie. Pasivní antény jsou levnější a účinnější, ale nesplňují potřeby každé aplikace. Aktivní anténa může být dobrou volbou v husté zástavbě ve městě, uvnitř budov a podobných místech se slabým signálem. LNA zesilovače v aktivní anténě výrazně zvyšuje schopnost přijímat slabé signály, ale také výrazně zvyšuje spotřebu energie. Větší pasivní anténa často poskytuje stejný výkon jako menší aktivní anténa, přičemž stále poskytuje vysokou úroveň přesnosti.
Většina GNSS přijímačů má frekvenci aktualizace 10 Hz nebo vyšší, ale některé lokalizační aplikace se spokojí i s mnohem pomalejšími a energeticky méně náročnými aktualizacemi. Výběr optimální frekvence aktualizace má největší dopad na spotřebu energie. Další možností jak snížit spotřebu energie je počet souběžně sledovaných konstelací GNSS, použití tzv. asistovaného GNSS a nebo využít různé napájecí režimy (obrázek 2).
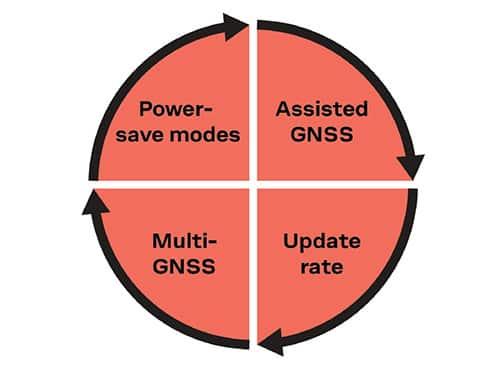
Obrázek 2: Kromě použití nejúčinnějšího hardwarového řešení je k dispozici několik možností pro optimalizaci výkonu a spotřeby energie. (Zdroj obrázku: u-blox)
V některých aplikacích je žádoucí sledovat více GNSS družic současně. Příjem signálu z více družic zajistí větší robustnost a přesnost určování polohy, ale zvýší se spotřeba energie. Je důležité správně analyzovat provozní prostředí a používat minimální počet signálů GNSS, abychom dosáhli dostatečné přesnosti požadované lokalizačním systémem.
Vypnutí funkce GNSS šetří energii nejvíce, ale při každém zapnutí probíhá tzv. studený start. Čas do první fixace (TTFF) ve studeném startu trvá běžně 30 sekund i déle. Čas závisí na dostupnosti a síle signálu GNSS, velikosti a umístění antény.
Funkce asistované GNSS může snížit čas TTFF a přitom stále poskytovat přesné informace. Asistované GNSS lze implementovat několika způsoby. Například pomocí aktuální a předpokládané polohy družic a parametrů časování (nazývaných „efemeridová data“) nebo pomocí přesných korekčních dat o čase a stavu družice. Některé GNSS přijímače mají autonomní režim, který interně vypočítává předpokládané GNSS orbity, čímž se eliminuje potřeba externích dat a připojení. Použití autonomního režimu však může vyžadovat pravidelné zapínání přijímače a to zvyšuje spotřebu.
Úsporné režimy
Vždy se jedná o nalezení o kompromisu mezi frekvencí aktualizace a spotřebou energie ( nepřetržité sledování, cyklické sledování, provoz zapnuto/vypnuto a snímek polohy (obrázek 3). Výběr optimálního režimu sledování je dalším důležitým hlediskem při definování výkonu a spotřeby konkrétní aplikace. Pokud se změní provozní podmínky a optimální režim úspory energie nebude k dispozici, systém by se měl automaticky přepnout na další režim s nejvyšší úsporou energie, aby byla zajištěna nepřetržitá funkčnost a úspora.

Obrázek 3: Energeticky úsporné provozní režimy je třeba sladit s požadovanou frekvencí aktualizace dat, aby se optimalizoval výkon systému GNSS. (Zdroj obrázku: u-blox)
Nepřetržité sledování je vhodné pro aplikace, které vyžadují několik aktualizací za sekundu. Přijímač GNSS získá svou polohu, stáhne almanach (data o přibližné poloze všech družic ) a efemerid (data ke zpřesnění polohy družice) a poté se přepne do režimu sledování, aby se snížila spotřeba energie.
Cyklické sledování – frekvence aktualizace je několik sekund. Antény by měly být dostatečně velké, aby se zajistila funkčnost i tam, kde je síla signálu slabá. Další úspory energie lze dosáhnout, pokud sledování nevyžaduje vyhledávání polohy nových družic.
Provoz zapnuto/vypnuto - přepínání mezi aktivitami získávání/sledování a režimem spánku. Doba spánku je obvykle několik minut a provoz zapnuto/vypnuto vyžaduje vysokou úroveň signálu GNSS, aby se minimalizoval čas TTFF a tím i spotřeba energie po každém probuzení.
Snímek polohy (Snapshot positioning) šetří energii pomocí GNSS přijímače pro místní zpracování signálu v kombinaci se zpracováním dat v cloud computingu, kde probíhají výpočetně náročné operace pro zjištění polohy. Je-li k dispozici připojení k internetu, snímek polohy může snížit spotřebu energie přijímače GNSS až desetkrát. Toto řešení je efektivní tam, kde je potřeba pouze několik aktualizací polohy za den.
Vestavěná anténa GNSS
Modul antény SAM-M8Q od u-blox je vhodný pro souběžný příjem signálů GPS, Galileo a GLONASS (obrázek 4). Použití všech tří konstelací najednou vede k vysoké přesnosti polohy i v prostředích se slabým signálem, jako je například městská zástavba. Pro urychlení určování polohy a zlepšení přesnosti podporuje SAM-M8Q funkci kvazizenitového satelitního systému (QZSS), rozšířenou navigaci GAGAN a indoor messaging system (IMES), rozsáhlý augmentační systém (WAAS), evropskou překryvnou službu geostacionární navigaci (EGNOS) a satelitní rozšiřující systém MTSAT.

Obrázek 4: Modul SAM-M8Q podporuje současný příjem až tří zdrojů GNSS (GPS, Galileo, GLONASS). (Zdroj obrázku: u-blox)
Modul SAM-M8Q může využívat asistenční službu u-blox AssistNow, která poskytuje almanach a zpřesňující data efemerid, aby se čas TTFF výrazně zkrátil. Prodloužená platnost dat AssistNow Offline (až 35 dní) a Autonomních dat AssistNow (až 3 dny) podporuje rychlejší TTFF i po delší době.
Tato vývojová Google Cloud platforma poskytuje jednoduchý způsob připojení a zabezpečení aplikací založených na PIC MCU. GNSS 4 click od MikroElektroniky obsahuje modul SAM-M8Q a je navržen s vývojovou deskou PIC-IoT WG od Microchip Technology (obrázek 5). Deska PIC-IoT WG poskytuje návrhářům nástroje pro analýzu a strojové učení.

Obrázek 5: GNSS 4 click board nese modul antény SAM-M8Q od u-blox. (Zdroj obrázku: Digi-Key)
Multi-příjem GNSS plus bezdrátové připojení
Pro malá zařízení lokalizačního systému, jako jsou například sledovací zařízení, je vhodné použít modul, který podporuje všechny druhy GNSS současně (GPS/Galileo/GLONASS) a navíc i konektivitu LPWAN LTE. Takový modul nabízí Thales a jedná se o Cinterion TX62 (obrázek 6).
Flexibilní architektura modulu podporuje spouštění aplikací buď v hostitelském procesoru nebo přímo uvnitř modulu v integrovaném procesoru. TX62 podporuje úsporný režim 3GPP (PSM) a rozšířený nespojitý příjem (eDRx) pro aplikace citlivé na spotřebu. Doba spánku PSM bývá mnohem delší než u eDRX. Tyto delší doby spánku umožňují přejít do hlubšího režimu spánku s nižší spotřebou energie než u eDRX. Spotřeba ve spánku PSM je pod deseti mikroampéry, zatímco spotřeba ve spánku eDRX je až 30 mikroampérů.

Obrázek 6: Modul TX62 IoT podporuje komunikaci LTE-M, NB1 a NB2 a multi-konstelační GNSS. (Zdroj obrázku: Thales)
Bezpečnostní funkce TX62 zahrnují bezpečné úložiště klíčů a manipulaci s certifikáty, které podporují důvěryhodnou registraci na cloudových platformách a zároveň chrání zařízení a data, plus důvěryhodná identita je předem integrovaná do zabezpečené části paměti TX62 během výroby. V případě potřeby lze využít integrovanou eSIM, která může zjednodušit logistické a výrobní procesy a zlepšit flexibilitu v terénu prostřednictvím dynamických aktualizací.
Vývoj lokalizačních systémů v aplikacích Arduino Portenta H7 je zjednodušen pomocí Portenta Cat. M1/NB IoT GNSS Shield (obrázek 7). Špičkový výpočetní výkon Portenta H7 s konektivitou TX62 umožňuje vývoj aplikací pro sledování majetku a vzdáleného monitorování v inteligentních městech, průmyslu, zemědělství a dalších oblastech. Základní varianta Portenta Cat. M1/NB IoT GNSS Shield neobsahuje GSM/UMTS anténu. Je nutné vybrat kompatibilní anténu jako je například dipólová pětipásmová vodotěsná anténu Arduino.
Obrázek 7: Portenta CAT.M1/NB IoT GNSS Shield obsahuje IoT modul TX62-W (velký žlutý čtverec). (Zdroj obrázku: Arduino)
Mezi další výhody IoT GNSS shield Portenta CAT.M1/NB patří:
- Možnost změnit konektivitu bez výměny desky
- Obsahuje lokalizační funkce a NB-IoT, CAT.M1
- Výrazně snížené požadavky na komunikační šířku pásma v zařízeních IoT
- Kompaktní formát 66 mm x 25,4 mm
- Průmyslové provozní teploty: -40 °C až +85 °C
Závěr
Pokroky v technologii GNSS s nízkou spotřebou způsobily růst používání lokalizačních systému v inteligentních městech a průmyslu. Pouhé použití energeticky úsporného hardware je však pouze výchozím bodem. Stejně důležitým aspektem je také optimalizace firmware, aby se dosáhlo optimálního a energeticky účinného řešení.
Článek vyšel v originále na webu DigiKey.com, autorem je Jeff Shepard.



