
Akcelerometry umožňují měřit zrychlení působící na jeho ústrojí. Je li obvod v klidu, pak dokáže poměrně přesně měřit i gravitační zrychlení. Při správném vyhodnocení měřených údajů pak lze zjistit o kolik stupňů a v jakém směru je vychýlená rovina obvodu oproti rovině kolmé na vektor gravitačního zrychlení. Grafická prezentace měřených údajů pak odpovídá klasické vodováze.
Jedním z mnoha výrobců akcelerometrů je i firma Freescale. Ve své nabídce má hned několik vhodných obvodů. Jejich velikost je menší než 1x1cm a cena řádově kolem sta korun. Spojením akcelerometru s mikrokontrolérem a displejem lze vytvořit cenově dostupné zařízení schopné měřit náklon a sklon. Výsledkem je jakási obdoba vodováhy schopná měřit a prezentovat údaje digitálně – digitální vodováha.
Popis a návrh blokového schéma
Cílem konstrukce má být příruční přenosný přístroj s napájením z baterií. Pro zobrazení údajů použiji levný grafický displej, který vyžaduje napájecí napětí 5V. Napájení zařízení vzhledem k přenosnosti musí být z baterií. Jako vhodné baterie se jeví 9V, nebo 4ks sériově zapojeních baterií typu AA nebo AAA. Kvůli co nejmenším rozměrům jsem zvolil 9V baterii, která je menší než pouzdro na 4 tužkové baterie.
Ke zmenšení napájecího napětí na 5V použiji snižující DC/DC měnič.Při požadovaném výstupním proud max. 100mA jsou rozměry zapojených měničů obdobné jako rozměry lineárních stabilizátorů. Jejich účinnost se pohybuje nad 90 %, tedy výrazně víc než u levnějších lineárních stabilizátorů. Nevýhodou měniče je průnik rušivých vf. složek do ss. výstupního napětí.
Většina akcelerometrů má 3,3V napájecí napětí a velmi malou spotřebu, řádově stovky mikroampér. Potřebné napětí bych mohl vytvořit z 5V napájecí větve pomocí lineárního stabilizátoru s malým úbytkem. Rušení z DC/DC měniče by mohlo pronikat za tento stabilizátor a pravděpodobně by způsobilo zhoršení přesnosti akcelerometru. Nabízí se ale možnost použít nezávislý napájecí zdroj. Díky velmi malé spotřebě senzoru a příp. použití tzv. sleep módu bude mít i baterie s velmi malou kapacitou životnost až několik let. Jako vhodnou pro tuto aplikaci jsem zvolil knoflíkovou baterii.
Mozkem celého přístroje bude mikrokontrolér (MCU). Měl by mít zabudovaný AD převodník a kvůli grafickému displeji a ostatním periferním zařízením minimálně 32 I/O pinů. Měřená data budou zpracována matematicky a je proto nezbytná větší statická paměť. Kvůli levnému grafickému displeji, který nemá zabudovanou paměť na znakovou sadu musí mít
MCU také velkou programovou paměť. Zadaná kritéria splňuje více MCU. Já jsem vzhledem k dobrým zkušenostem s mikrokontroléry fy. AVR a zjednodušení programování zvolil MCU ATMEGA128. K plnému využití výhod digitálního měřícího přístroje jsem ještě přidal USB rozhraní v podobě převodníku FT232RL.

Obr.1: Blokové schéma digitální vodováhy
Popis zapojení

Napájecí napětí z 9V baterie je přivedeno na spínací tranzistor umožňující softwarové vypínání z MCU. Napětí od tranzistoru je dále vedeno k DC/DC měniči LM2674. Měnič je nastaven na výstupní napětí 5V. Dokáže jej dodržet v rozsahu vstupních napětí cca 6,5 -45V. Tento rozsah s rezervou pokryje nabitou i vybitou 9V baterii. K dosažení co nejvyšší účinnosti pracuje měnič na poměrně vysoké frekvenci 250kHz. Výrobce uvádí že účinnost by měla být ve využívané oblasti napájecích napětí lepší než 92%. Zapojení obvodu DC/DC měniče bylo převzato z datasheetu výrobce. Akcelerometr není napájen z měniče kvůli snížení jeho EM rušení. Je napájen 3,3V baterií typu RL2032. K minimalizování průniku rušivých napětí je zem DC/DC měniče spojena s 3,3V baterií v jednom bodě.
Tato verze vodováhy používá ke snímání gravitačního zrychlení analogový akcelerometr MMA7631L fy. Freescale. Kvůli možnosti vyzkoušet přesnost několika typů akceleromerů jsem akcelerometr umístil na samostatnou DPS. Zvolené zapojení umožňuje použít 3 různé typy analogových akcelerometrů a jeden digitální. Všechny z nabídky fy. Freescale. Kvůli rozdílným napětím jsou mezi akcelerometrem a MCU převáděny logické úrovně pomocí hradel 74LVX a 74HCT.
Mikrokontrolér ATMEGA128 pracuje na frekvenci 4MHz. Programování je realizováno rozhraním ISP. Pro komunikaci s displejem využívám porty A a C. USB rozhraní je přes obvod FT232 připojeno k 1. USART rozhraní. Případná komunikace s digitálním akcelerometrem je realizována pomocí rozhraní SPI. Přídavná paměť EEPROM je připojena k I2C. Analogové výstupy z akcelerometru jsou přivedeny na první 3 kanály AD převodníku. Ostatní kanály jsou využity k monitorování napětí na bateriích a intenzity okolního osvětlení. Dále využívám 2 PWM kanály k řízení intenzity podsvětlení displeje a vytváření zvuků.
Data z analogových akcelerometrů snímám s vzorkovací frekvencí 2kHz. Při zpracovávání dat nejprve provádím podvzorkování v podobě aritmetického průměru z N vzorků. Kde parametr N nejvíce ovlivňuje dynamickou odezvu měření. Následně využívám číslicovou filtraci pomocí IIR filtru 2. řádu s mezní frekvencí 10Hz.

Obr.2: Schéma zapojení digitální vodováhy
Popis konstrukce
Veškerá elektronika mimo akcelerometr a displej je umístěná na hlavní desce. Akcelerometr je připojen v podobě patice, která zajišťuje zvětšení pouzdra pro jeho snazší používání a případnou výměnu. Kvalitní zapájení obvodu akcelerometru v amatérských i poloprofesionálních podmínkách je značně obtížné. Proto byl akcelerometr umístěn na vlastní DPS, kterou pomocí přetavení zapájela firma MSV elektronika. Display je dodáván na vlastní DPS.
Tělo vodováhy vzdáleně připomíná úhelník. Ramena úhelníku mají délku 200 a 300 mm, jsou vyrobeny z hliníkových profilů typu U 20x20 mm. Poměrně velké rozměry základny jsou dány rozměry grafického displeje, 2 baterií a paticí akcelerometru. Připřípravě pro výrobu větších sérií by bylo možno dosáhnout i poloviční velikosti těla měřícího přístroje.
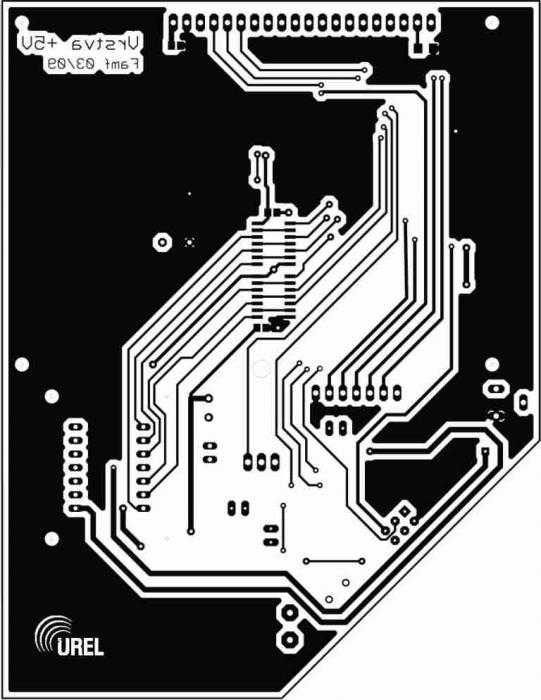
Obr.3 : Výkres plošného spoje, spodní strana
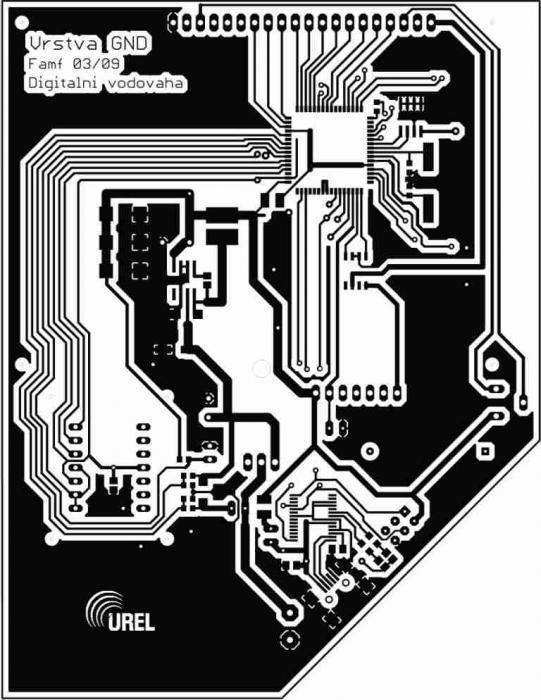
Obr.4 : Výkres plošného spoje, horní strana
Numerické zpracování měření a dosažená přesnost
Vodováha měří zrychlení ve 3 osách s vzorkovacím kmitočtem cca 2kHz. Snímaný signál je zkreslen poměrně značným množstvím šumu. Aby bylo dosaženo co nejpřesnějších a nejméně kolísajících výsledků byly nejprve získané hodnoty zprůměrňovány a následně filtrovány dolní propustí. Tyto operace sice zajistí dobré potlačení šumu, ale jsou na úkor dynamické odezvy měření.
Ze vzorků zrychlení se nejprve vypočte vektor gravitační síly gm:

Protože v následujících výpočtech se vypočítává poměrem mezi zrychlením v dané ose a vektorem gravitační síly, není potřeba údaje z akcelerometru přepočítávat na skutečnou velikost zrychlení. Nicméně je nezbytné odečíst konstantu odpovídající nulovém zrychlení od vstupních dat. Výsledkem je znaménková hodnota s nulou odpovídající nulovému zrychlení. Tyto hodnoty se dosazují za ax,y,z. K dosažení očekávaných výsledků ve stupních je použito goniometrických funkcí:

Měřené inklinační údaje jsou zatížené značnou statickou chybou měření, způsobenou nesprávným mechanickým uložením akcelerometru a uchycením k tělu přístroje. Pro dosažení přesných údajů o sklonu a náklonu by bylo potřeba provést kalibraci na kalibrační stolici. Případná kalibrace je značně usnadněna díky USB portu přístroje. Kalibraci lze provést na plně automatické stolici a může dosahovat velké přesnosti. V amatérských podmínkách by bylo možné alespoň nastavit správně offset přístroje pomocí položení na klidnou vodní hadinu. Tento postup je značně riskantní z důvodu zničení přístroje utopením. Přesnost měření vodováhy vzhledem k nedostupnosti přesné náklopné plošiny nebylo možno určit.
Závěr
Stále klesající cena a zlepšující se přesnost akcelerometrů umožňuje jejich používání v amatérských zařízeních. Výsledkem aplikace může být např. digitální vodováha. Ve srovnání s klasickou vodováhou má tato spoustu nevýhod. Nicméně vytvořené zařízení oproti klasické vodováze umožňuje s vhodným zpracováním údajů měřit ve všech polohách. Také určitě zaujme moderním vzhledem a možností ukládání změřených úhlů. Určitě by bylo vhodné porovnat přesnost vytvořené vodováhy s ostatními typy vodováh. Bohužel to není možné do doby než provedu kalibraci, resp. referenční měření na náklopné stolici. Podle pozorování při naklápění v ruce má zařízení přesnost minimálně 0,5°. Celková cena vodováhy dosáhla asi 2500Kč. Je to ale prototyp s mnoha nadbytečnými částmi. I tak se cena značně liší od obdobných profesionálních zařízení využívající měření zrychlení. Jejich přesnost je v celém rozsahu ±0,1°, ale cena se pohybuje kolem 250 000 Kč. V tomto pohledu je vytvořená vodováha velmi zajimavá.
Použitá literatura
[1] FAMFULÍK, L. Digitální kyvadlový inklinometr. Brno: Vysoké učení technické v Brně,Fakulta elektrotechniky a komunikačních technologií, 2008. 39 s.
[2] http://www.atmel.com/dyn/resources/prod_documents/doc2466.pdf
[3] http://www.freescale.com/files/sensors/doc/data_sheet/MMA7361L.pdf?pspll=1




Komentáře
obslužný program
Ahoj, ta vodováha se mi zamlouvá, je to dobrý nápad, ale marně hledám kde k ní sehnat obslužný program?
Nebyl by k mání?
Martin
Bohužel momentálně nemám
Bohužel momentálně nemám SW, který bych mohl zveřejnit, protože obsahuje části, které vyvíjím pro firmu. Nicméně pokud by jsi měl opravdu zájem o vyrobení vodováhy, tak software upravím a zveřejním. Musím, ale varovat, že vystavené DPS obsahují pár chyb. Martine, jestli máš zájem o konstrukci tak mi napiš adresu a nějak se domluvíme.
Zaujala mne Vaše konstrukce i jako hračka je určitě dobrý příkl.
Přimloval bych se pro to zveřejnění nějakého prográmku tak nějak pro kutily.
Měl bych ještě pár dotazů.
S uvedenými obvody by mělo jit měřit i zrychlení pohybu. S jakou přesností by to podle Vás bylo možné ? A v jakých časových úsecích?
Bylo by možné se například dostat pod 0,1 s? Kde by podle Vás mohla být mez?
Předpokládám nějaké amatérsky udělané zařízeníčko jako je toto.
Podařolo se Vám nakonec eliminovat ten šum (myslím konstrukčně - stínění,úprava zapojení na desce a nebo tak)?
Jan
Software
Ikdyž to trvalo ale konečně jsem dal dohromady software, který je zveřejnitelný (přiložený k tomuto článku). Na displeji je textově zobrazovaný náklon a demo připraveného grafického vykreslování. Pro měření zrychlení byl použitý senzor původně určený. Dynamická odezva systému na zrychlení může být až 1kHz, ale otázkou je s jakou přesností. Šum eliminovat nelze, jde pouze potlačit. Vlastní šum senzoru je hodně velký, takže účinně lze potlačit jedině lepším senzorem (viz. akcelerometry analog devices)
No já tedy nevím, ale při
No já tedy nevím, ale při přesnosti 0.5° mi chyba vychází na cca 8mm / 1000mm, což je dobré tak asi na hraní. Obyčejná zednická vodováha za pár Kč má přesnost +/- 1.5mm / 1m. Takže buď jsem něco nepochopil nebo je někde chyba :-). Např. elektronická vodováha zde
http://www.e-meridla.cz/digitalni-vodovahy/digilevel-elektronicka-vodova...
za 2500Kč má přesnost ± 0,05°. Takže za těch čtvrt mega to určitě přesnost 0.1° mít nebude.
Pro zedníky je v
Pro zedníky je v současném stavu opravdu nepoužitelná. Bohužel, tento projekt byl jenom pokus a zvětšení přesnosti by znamenalo značné zásahy do DPS. Nicméně pomocí zednické vodováhy nelze změřit jiný úhel, než na který je nastavená. Co se týče odkazu, tak zmíněná vodováha měří pouze sklon a neumožňuje grafické znázornění. V článku jsem psal o obdobné vodováze měřící ve 3 osách!! Navíc uvedená přesnost 0,05° je značně zavádějící a v přiloženém návodu ji uvádí měnší (0,2°) pro celý rozsah!
Ještě jednou ke snímání vodováhy
Zdravim. Asi je to už dávno, ale zajímalo by mě zda dokážete navrhnout i vodováhu pro vyrovnávání obytných aut. Mám jedno upravené a chtěl bych si ho upravit tak, aby se mě po zhasnutí motoru! A zmáčnutí tlačítka vysunuly motorové nůžkové hevery na 12V tak, aby se obytka automaticky vyrovnala s tím, že by projely asi nejdříve jednotlivé nohy a potom by podle této informace vyrovnali auto do vodováhy. Vím, že to není na jednu noc, ale co by taková srandička mohla stát, Moc díky Pavel