
Analogové výstupy
 Od analogových výstupů se očekává možnost dálkového řízení příslušných činností a také funkcí. Mohou být přitom součástí složitější (komplexní) smyčky v PLC či PID (proportional-integral-derivative) systému, případně jen vykonávají základní, jednoduché funkce typu zapnutí / vypnutí osvětlení či ventilace. Ve většině případů bude nezbytné příkazy zajišťovat mikroprocesor. Blok analogových výstupů je pak vyhodnotí a převede do vhodné podoby analogových nebo také logických signálů, kterými následně ovládá motory, ventily, relé apod. Číslicový obraz z CPU se tak např. může za výrazného přispění D/A převodníku (DAC) a dalších podpůrných obvodů, určených ke zpracování signálu, zpětně konvertovat do výchozího analogového světa (napětí nebo proud). Na každém výstupu tak máme k dispozici signály, „šité přímo na míru“. Nechybí ani případné další „vychytávky“ v podobě kalibrace
Od analogových výstupů se očekává možnost dálkového řízení příslušných činností a také funkcí. Mohou být přitom součástí složitější (komplexní) smyčky v PLC či PID (proportional-integral-derivative) systému, případně jen vykonávají základní, jednoduché funkce typu zapnutí / vypnutí osvětlení či ventilace. Ve většině případů bude nezbytné příkazy zajišťovat mikroprocesor. Blok analogových výstupů je pak vyhodnotí a převede do vhodné podoby analogových nebo také logických signálů, kterými následně ovládá motory, ventily, relé apod. Číslicový obraz z CPU se tak např. může za výrazného přispění D/A převodníku (DAC) a dalších podpůrných obvodů, určených ke zpracování signálu, zpětně konvertovat do výchozího analogového světa (napětí nebo proud). Na každém výstupu tak máme k dispozici signály, „šité přímo na míru“. Nechybí ani případné další „vychytávky“ v podobě kalibrace
- předpětí (Bias),
- offsetu nebo také
- zesílení.
Představa návrhu diskrétních struktur a jejich výstupů s volitelným bipolárním / unipolárním napětím nebo také proudem může nahánět hrůzu, zejména pak v případě, kdy si v rámci plného měřítka, které máme k dispozici, uvědomíme výchozí potřebu řízení velikosti zesílení s přihlédnutím k jeho změnám, přítomnost vícenásobných resetovacích hladin pro bipolární / unipolární napětí a také odlišné úrovně výstupního proudu.
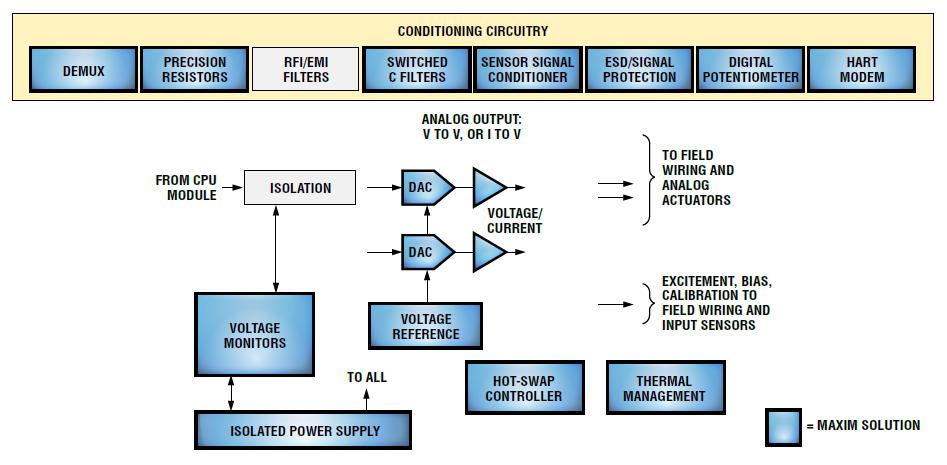
Zjednodušený blokový diagram výstupních analogových struktur v rámci PLC. Ucelenou nabídku přesných, spolehlivých a také flexibilních čipů v režii Maximu přináší [2].
Bez ochran si „podřežeme větev“
Výstupní analogové struktury připojujeme k elektrickým rozvodům, které mohou v praxi dosahovat různých délek, ať již malých nebo velkých, takže výstupní modul musí navíc ochránit systém před
 ESD,
ESD,- RFI a také
- EMI.
V případě přenosů na kratších vzdálenostech můžeme použít napěťové výstupy. Delší kabeláži bude zase více „sedět“ výstup proudový a to z důvodu omezení EMI z jiskřících zdrojů rušení (spínače, motory, apod.).
Něco o kabelech aneb jdeme monitorovat
Dohledové funkce nad výstupními signály, zahrnující např. detekci a následné hlášení přerušeného vodiče, vytváří výrazný zabezpečovací prvek. (Samotné kabeláži, ať již té v počítači nebo kterékoli jiné, se často nevěnuje zvláštní pozornost. Vše se přitom odbývá slovy: „Vždyť je to jenom kus drátu“ - energetici s horolezeckými kurzy, pečliví technici, skládající PC a ohýbající přitom ploché kabely do pravého úhlu nebo skalní „hifisté“ zajisté prominou. I takový „kus drátu“ však dokáže pěkně potrápit!) Což teprve v případě, bude – li se v daném provozu kabely pohybovat nebo je necháme „na hraní“ vibracím a dalším destruktivním vlivům. Kdo by se pak divil, když jednoho krásného dne dojde k přerušení vodiče, příp. zkratu s další žilou? Aby tedy mohla být zaručena bezpečnost jak samotného zařízení tak i obsluhujícího personálu, musíme vymyslet pečlivý monitoring.
Dříve než může dojít k nevratné poruše se budeme u problematické kabeláže zpravidla setkávat s přerušovanou činností či výpadky. Takové občasné jevy pak tvoří vhodnou příležitost k lokalizaci chyby a to dříve, než bude příliš pozdě. Právě zmíněná detekce chyb tvoří důležitou součást preventivních opatření (údržby), které zvyšují bezpečnost a omezují zbytečné prostoje daného závodu. Nemusíme dvakrát zdůrazňovat, že nejen v továrnách mohou být EMI a RFI spolu s nárazy elektrického proudu nesmírně vysoké. Každý dohledový systém proto musíme podtrhnout vysokou odolností a také spolehlivostí, což ovšem platí i o samotném způsobu hlášení chybového stavu. V praxi se proto k reportování (podávání zpráv) váže i jakási minimální časová perioda, vyhrazená pro detekci a následné postoupení chyby. Jindy se zase obrovské impulzní rušení může „tvářit“ jako krátkodobé přerušení vodiče, což ovšem nemusí automaticky znamenat náš případ. Mechanické poškození kabelu bude mít totiž snahu trvat o něco déle než dané rušení. V typické situaci se budou rušivé impulzy dostávat kapacitní nebo také induktivní vazbou ze sousedních, těsně navázaných kabelů, kterými necháváme protékat proudy i s jejich velkými změnami amplitudy. Takové šumové zákmity se mohou vyskytnout při spouštění nebo také vypínání velkých motorů, kdy přechodové děje se svými náběžnými i sestupnými časy, odrážející proudové změny, vystupují na komunikačních kabelech jako derivační impulzy s krátkou dobou trvání. Bude – li tedy detekční obvod chvíli vyčkávat (může se přitom jednat o zlomky sekundy) může lépe rozlišovat mezi skutečným fyzickým přerušením kabelu a „pouhým“ rušivým impulzem. Detekční periodu přitom volíme
- dost dlohou na to, abychom zabránili falešným poplachům, způsobeným rychlými přechodovými ději, vystupujícími ze zarušeného okolního prostředí
a zároveň
- dostatečně krátkou, abychom ještě zachytili i ne tak dlouhé mechanické závady na kabeláži.
Se zvýšenou mírou zabezpečení se pak setkáváme v případě, ve kterém budeme muset sledovat víc, než jen samotnou „kondici“ kabelu, např. teplotu čipu a tudíž i důležitý ukazatel provozních podmínek. V praxi se však můžeme setkat i s tím, že se daný provoz bude rozprostírat na poměrně velké ploše. Významnou úlohu v otázce spolehlivosti zde proto také sehraje monitorování napěťových úbytků napájecích zdrojů nebo tzv. brownoutů (pokles napětí).
Poruchy už máme – a co teď s nimi?
 Pokud se již chyba na výstupní straně jednou vyskytla, musíme ji zachytit a zalarmovat mikroprocesor cestou příslušného pinu hardwarového přerušení. Systémová jednotka tak bude mít čas reagovat na vzniklý, krátkodobý výpadek na kabelové trase. Abychom to však neměli zase tak jednoduché, občasné poruchy na vedení bývají asynchronní, přičemž mnoho z nich se vyskytne právě tehdy, kdy se to procesoru bude nejméně hodit, tzn. když je „busy“. Po vygenerovaném přerušení může procesor „sáhnout“ do registrů výstupního obvodu, ze kterých si vyčte přesné okolnosti vzniku poruchy.
Pokud se již chyba na výstupní straně jednou vyskytla, musíme ji zachytit a zalarmovat mikroprocesor cestou příslušného pinu hardwarového přerušení. Systémová jednotka tak bude mít čas reagovat na vzniklý, krátkodobý výpadek na kabelové trase. Abychom to však neměli zase tak jednoduché, občasné poruchy na vedení bývají asynchronní, přičemž mnoho z nich se vyskytne právě tehdy, kdy se to procesoru bude nejméně hodit, tzn. když je „busy“. Po vygenerovaném přerušení může procesor „sáhnout“ do registrů výstupního obvodu, ze kterých si vyčte přesné okolnosti vzniku poruchy.
Výstupy musíme chránit před běžnými poruchami a také zkraty. Některé stavy přitom nelze tolerovat, např. přímý zásah bleskem. Tak jako tak by ale měl výstup vydržet a „přežít“ rozumné chybové potenciály. Mezi nejčastější závady patří zkrat na zem nebo napájecí napětí 24 V. V takovém případě by námi vyvíjený systém neměl být ohrožen a už vůbec by neměla připadat v úvahu výměna poškozeného čipu.
Podpora systémových funkcí
Některá čidla vyžadují ke své činnosti vhodné buzení, přičemž výstupní moduly takové signály umí zajistit. Typickým příkladem jsou střídavé (AC) úrovně pro kapacitní či elektromagnetické snímače, resp. stejnosměrné signály pro buzení LED v podsvětlených spínačích. V souvislosti s analogovými výstupy rovněž hovoříme o podpoře dalších funkcí systémového managementu – spolupráci s lokálními, izolovanými napájecími zdroji, monitorování teploty nebo také kalibraci.
S typickými obvody, určenými pro nasazení na pozici analogových výstupů, se seznámíme příště.
 Použitá literatura:
Použitá literatura:
- [1] http://www.maxim-ic.com/solutions/guide/industrial/PLC.pdf
- [2] http://www.maxim-ic.com/solutions/plc
- [3] http://www.maxim-ic.com/
Download a odkazy:
- Návrh PLC očima vývojáře – 1. část
- Návrh PLC očima vývojáře – 2. část (Analogové vstupy)
- Návrh PLC očima vývojáře – 3. část (Analogové vstupy – příklady)
- Domovská stránka Maxim: http://www.maxim-ic.com/
- Distributor pro ČR: http://www.mespraha.cz/



