
![]() Aplikace MSS (detektor) je vybavena novým mikrokontrolérem MSP430AFE253. Jedná se o derivát MCU řady AFE2x3 od společnosti Texas Instruments. Mikrokontrolérem zde zároveň rozumíme 3kanálový špičkový obvod se třemi samostatnými modulátory Sigma Delta druhého řádu, pracujícími v rámci dynamického rozsahu 100 dB. Tato řada mikrokontrolérů, nabízející souběžné vzorkování napětí a proudu, dosahuje v otázce přesnosti vynikajících výsledků.
Aplikace MSS (detektor) je vybavena novým mikrokontrolérem MSP430AFE253. Jedná se o derivát MCU řady AFE2x3 od společnosti Texas Instruments. Mikrokontrolérem zde zároveň rozumíme 3kanálový špičkový obvod se třemi samostatnými modulátory Sigma Delta druhého řádu, pracujícími v rámci dynamického rozsahu 100 dB. Tato řada mikrokontrolérů, nabízející souběžné vzorkování napětí a proudu, dosahuje v otázce přesnosti vynikajících výsledků.
Zapojení vychází z detekce hustoty magnetického toku tak, aby bylo možné přesně vyhodnotit stav otevřeno / zavřeno u zásuvného podavače CD. Hustota magnetického toku je měřena špičkovým 24bitovým převodníkem typu Sigma Delta. Měřicí rozsah je ± 670 Gauss a závisí na použitých Hallových senzorech. Tato čidla na svém výstupu zajišťují napětí, úměrné magnetickému poli. O přesnou indikaci koncové pozice podavače, tj. stavu otevřeno / zavřeno, se starají příslušné LED. Aby bylo možné zlepšit rozlišení systému, vřele doporučujeme kalibraci magnetického senzoru. Odpovídající hustota se pro oba stavy, tj. otevřeno (B1) a zavřeno (B2), zobrazuje na připojeném LCD.
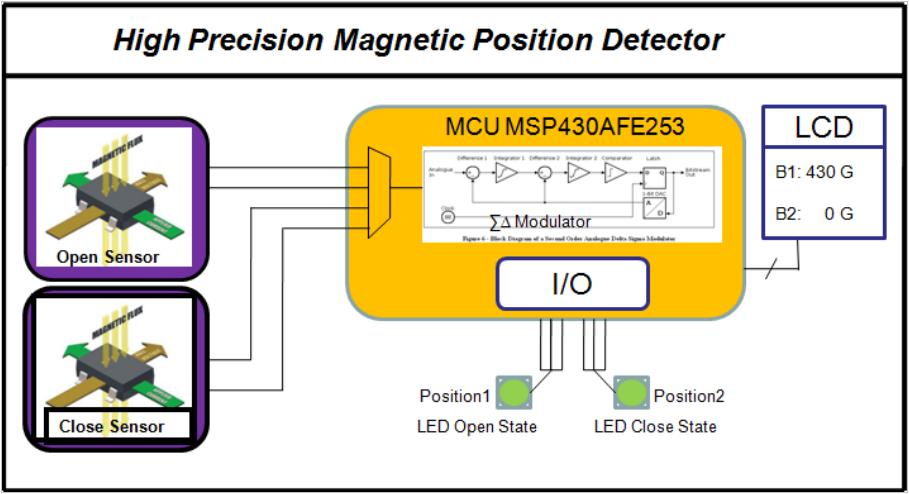
Obr. 1: Blokový diagram aplikace MSS s AFE253
Popis zapojení (viz obr. 2)
Dříve, než začneme popisovat aplikaci, bych rád krátce zmínil základní myšlenku tohoto API. Zapojení by mělo nahradit mechancké spínače CD (kompaktního disku). Na spodní straně slideru s funkcí otevřeno / zavřeno je umístěn malý permanentní magnet. K magnetické detekci polohy zde slouží dva Hallovy senzory MS1 a MS2. API navíc řídí kompletní natažení a běh CD. A teď se již na schéma zapojení podívejme podrobněji.
Součástka je napájena ze zdroje 3,0 V pro AVCC (analogová část) a DVCC (digitální část). Napětí pro ovládání relé a motoru má velikost 5,0 V. MCU běží na 1 MHz (odvíjí se od krystalu Q1). Aplikaci jsme dále vybavili třemi tlačítky S1, S2 a S3 (Reset). Po stlačení tlačítka Reset dochází k resetování systému a opětovnému spuštění.
Funkce č. 1 (S1)
Nejprve dochází k funkčnímu testu, při kterém vyzkoušíme motor disku. Stlačíme – li tlačítko č. 1, rozběhne se motor M1 (CD) a po dvou vteřinách se automaticky zastaví. Nyní provedeme funkci otevřít / zavřít, přičemž na detekci polohy dohlíží odpovídající senzory MS1 a MS2 (open / close).
Postup během manipulace
Jak jsme zmínili již výše, po stlačení S1 přejde pin č. 24 do nuly a vygenerovaný spouštěcí signál na pinu č. 17 aktivuje relé č. 1 a relé č. 4. Motor M2 se otáčí vpravo a slider „vyráží“ ven. Během fáze vysouvání začíná převodník typu Sigma Delta měřit hustotu magnetického toku senzoru MS2 (otevřeno). Na koncové pozici bude odpovídající výstupní napětí Hallova senzoru MS2 nepochybně větší než 500 mV. Rodílové vstupní napětí AFE (Analog-Front-End, ∑∆ Converter) je však typicky stanoveno na ±500 mV (gain 1). Neobejdeme se tedy bez vhodného přizpůsobení – na analogové vstupní piny proto zapojíme přesný dělič. Je – li dosaženo referenčního napětí MS2 (obr. 4), nenaměříme již na pinu č. 17 spouštěcí signál. Okamžitě dochází k zastavení motoru M2 a aktivaci LED č. 1. Tato LED indikuje venkovní pozici slideru. V dalším kroku již může být vloženo CD a opětovně stlačeno tlačítko S1. Jakmile se tak stane, motor M2 zasune slider zpět.
Relé č. 2 a relé č. 3 obdrží spouštěcí signál z pinu č. 18 a motor, pohánějící slider, se otáčí vlevo. S motorem M2 nyní opouštíme zmíněnou venkovní pozici a LED č. 1 zhasíná. V případě senzoru MS1 (zavřeno) dochází ke stejné proceduře jako v předchozím případě. Je – li tedy detekována úroveň referenčního napětí MS1, bude slider momentálně v poloze uzavřeno a LED č. 2 k tomu svítí zelenou barvou. M1 (motor disku) nyní běží a aktivuje se řídicí jednotka laseru, která je však ovládána z druhého MCU.
Hustota činí v případě použitého permanentního magnetu 40 Gauss. Způsob umístění na slideru a také poloha Hallových senzorů MS1 a MS2 však umožňují maximální měřitelnou hustotu pole 35 Gauss. S ohledem na rychlost slideru bude uložená referenční úroveň přibližně 25 Gauss. Praktické testy ukazují, že slider ke svému zastavení potřebuje nějaký čas. Na obr. 3 sice vidíme lineární průběh výstupního napětí magnetického senzoru, ale chování našeho systému bude nelineární – magnet se totiž pohybuje. Ostatně, podívejte se na obr. 4!
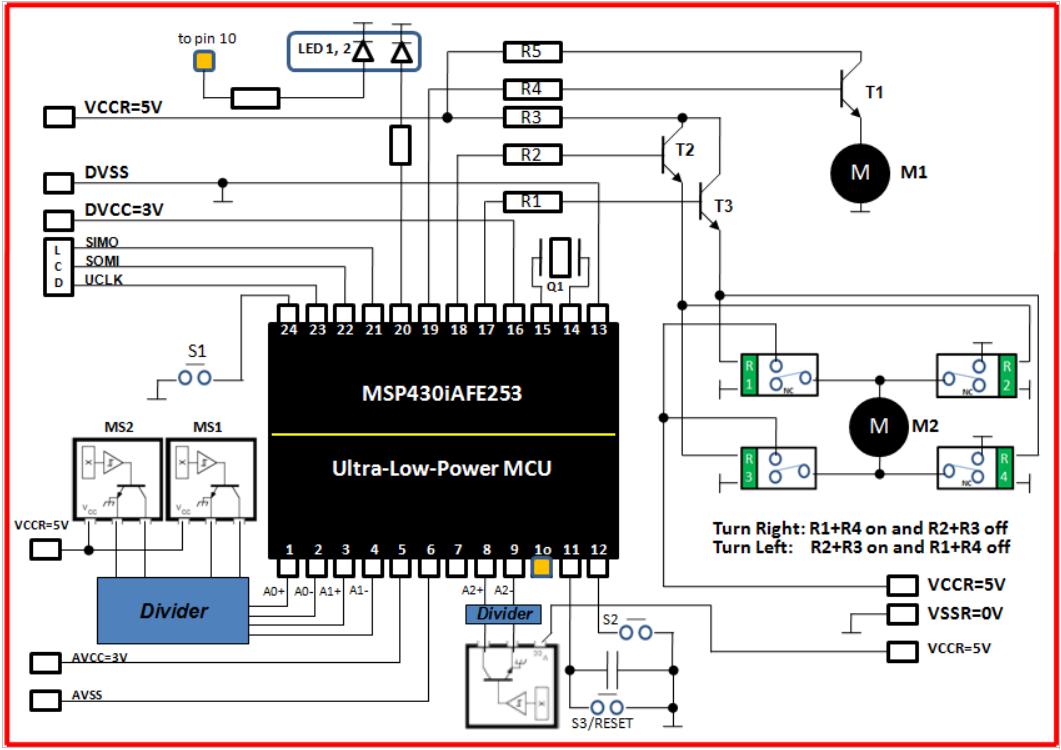
Obr. 2: MSS - API
Speciální vlastnosti
Funkce č. 2 (S2) umožňuje velmi přesné měření hustoty a také stanovuje polaritu použitého magnetu. Aplikace podporuje měření v magnetickém poli a to až do ±670 Gauss. Za velmi přesnou detekci magnetického pole odpovídá převodník typu Sigma Delta, resp. jeho analogové parametry. Rozlišení je zde lepší než 0,25 Gauss.
Po stisknutí S2 se spouští stejná „zasouvací“ procedura. Máme – li slider v jeho venkovní pozici a LED č. 1 svítí zeleně, můžeme na držák CD místo kompaktního disku připevnit zkoumaný magnet. Text na LCD displeji hlásá: Pro zasunutí magnetu prosím stiskněte S1 (Please press S1 to load the magnet). Slider i s magnetem vjíždí dovnitř a modul Sigma Delta je opět aktivní. Během zasouvání pak hustotu měří další Hallův senzor (MS3), umístěný uprostřed mechaniky, zatímco jeho napětí dostáváme na vývodech č. 8 a 9. Pochopitelně se ani zde neobejdeme bez vhodného děliče. Poté co dosáhneme koncové polohy, vyjíždí slider opět ven a LCD vyzývá uživatele k odebrání magnetu. Zároveň zde dochází k zobrazení naměřené hustoty (B1).
Ke zjištění polarity bude potřeba vložit magnet s opačnou polaritou dvakrát. Na obr. 3 vidíme výstupní Hallovo napětí v závislosti na vstupujícím magnetickém poli (Gauss). Pro 0 Gauss dostáváme výstupní úroveň přibližně 2,5 V. Tuto úroveň nazýváme napětím v nule. Bude – li pak jižní pól magnetu na držáku orientován směrem nahoru, dostáváme Hallovo napětí nad nulovou úrovní. V opačném případě, tj. pro severní pól orientovaný vzhůru, obdržíme Hallovo napětí pod jeho nulovou úrovní. Pomocí této jednoduché detekční metody jsme tedy stanovili polaritu.
Popis LCD rozhraní
Na schématu zapojení vidíme LCD rozhraní (Port1: Pin21…Pin23). Použité LCD – matice o rozměrech 48 x 84 pix. – vyžaduje SPI komunikaci. Využijeme proto 8bitový master v 3vývodové konfiguraci. Embedded modul SPI poskytuje na pinu č. 23 SPI hodiny a dále SOMI (Slave Out / Master In) a SIMO (Slave In / Master Out) na pinech č. 22 a 21. Master zahajuje přenos dat do LCD vysíláním UCLK (SPI hodiny). Na matici, složené z jednotlivých pixelů, se zobrazuje naměřená hustota B1 a B2 spolu s polaritou. Během kalibrace referenčních úrovní zde kromě toho máme k dispozici i obě hodnoty z MS1 a MS2.
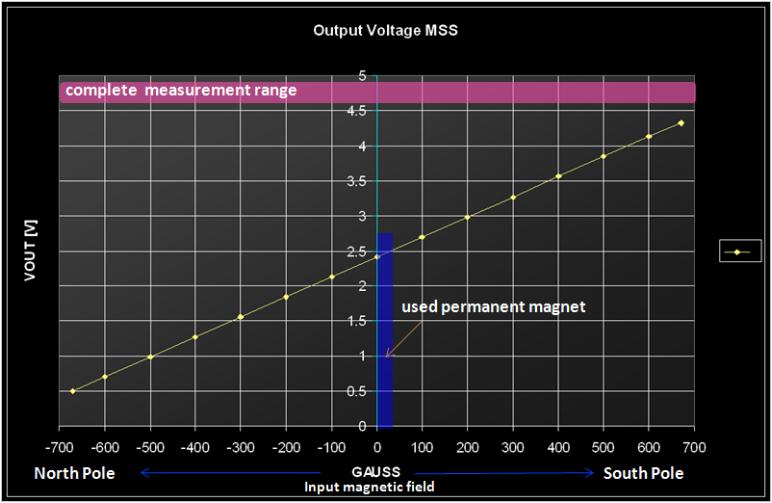
Obr. 3: Výstupní napětí magnetického senzoru
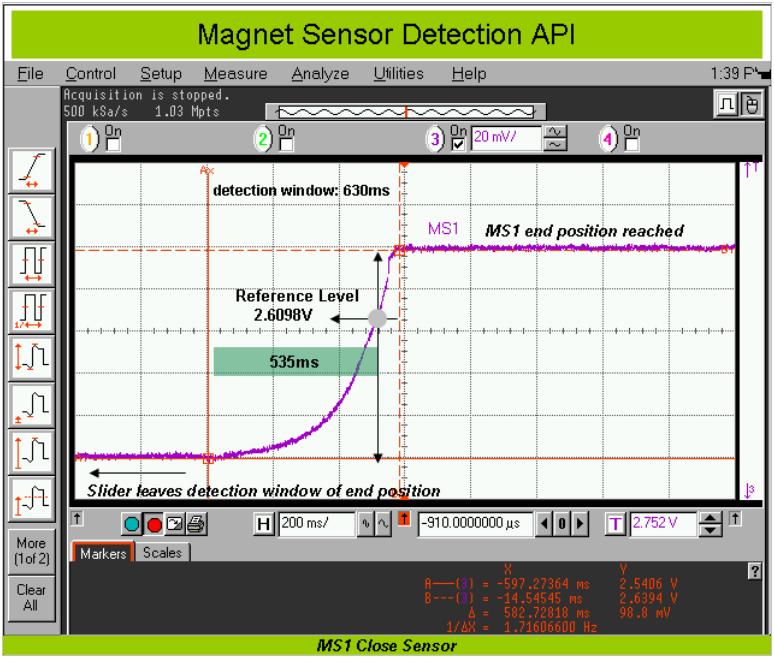
Obr. 4: Výstupní napětí v systému s magnetickým senzorem
Závěr:
Právě popsaná, velmi přesná aplikace byla vytvořena zejména proto, aby názorně ukázala možnosti 24bitového převodníku typu Sigma Delta. MCU s vestavěným 24bitovým převodníkem Sigma Delta je totiž navržen s ohledem na vysoce precizní měřicí aplikace.
Další možné aplikace:
- Monitorování výkonu (tzv. E-Metering)
- Výkonová měření na solárních panelech
- Snímání rychlosti
- Počítadlo pulzů
Zároveň chceme zdůraznit, že v aplikaci využíváme nízkopříkonový mikrokontrolér od Texas Instruments. Nízká vlastní spotřeba je totiž nezbytným předpokladem k dosažení prodloužené životnosti baterií v přenosných aplikacích. TI nabízí celou řadu produktů se špičkovými analogovými moduly, umocněnými neobyčejně nízkou vlastní spotřebou.
Autor:
- Herbert Schwarz, Texas Instruments, MSP430 Engineering Group, Freising
Download a odkazy:
- Pro podrobnější informace a popisy modulu odkazujeme na uživatelskou příručku a datasheet.



