
Řešení spočívá ve vytvoření dvou verzí simulátoru založeného na hardwaru NI CompactRIO a na platformě NI PXI Express s FPGA kartou. Centrálním prvkem simulátoru je model řízeného systému, který byl naprogramován s použitím softwaru pro návrh systémů NI LabVIEW a doplňku LabVIEW FPGA Module. Přesnost vytvořeného modelu byla ověřena s pomocí nástroje LabVIEW Control Design and Simulation Module, který patří ke stejnému systému.
Testování elektrického pohonu
Ve dvou verzích
- „Vyvinuli jsme dvě verze systému HIL, jednu se systémem CompactRIO a druhou na bázi hardwaru NI PXI Express. Mezi výhody verze CompactRIO patří snadná manipulace, malé rozměry a nízké náklady na potřebný hardware, zatímco systém PXI nabízí dodatečnou funkcionalitu. Hlavní architektura obou simulátorů je podobná a přechod mezi oběma systémy je hladký.“ — Jan Švanda, Development Engineer, ŠKODA ELECTRIC a.s.
Popis řízeného systému
Elektrický pohon se skládá z motoru — v tomto případě asynchronního, z invertoru a z řídicí jednotky, která řídí výstupní napětí konvertoru prostřednictvím PWM. Jednoduchý diagram tohoto uspořádání vidíte na obr. 1. Vstupní signály pro řídicí jednotku představují hodnoty proudu jednotlivými fázemi a napěťový signál ze senzoru rotační rychlosti. Všechny tyto signály se používají v řídicím softwaru, který běží v řídicí jednotce. Výstup řídicí jednotky představují signály pro tranzistory v invertoru (PWM). Řídicí jednotka dokáže pracovat s logickými vstupně výstupními signály a s dalšími řídicími jednotkami a s počítači komunikuje prostřednictvím sběrnic CAN a RS232.
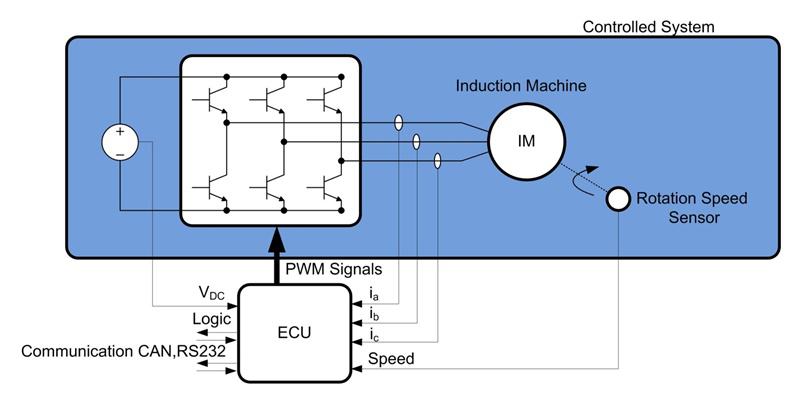
Obr. 1: Schéma základního zapojení řídicí jednotky a řízeného systému, modrý blok označuje simulovanou část
Popis architektury simulátoru
Jak již bylo uvedeno, vznikly dvě verze simulátoru — jedna založená na systému CompactRIO a druhá založená na platformě NI PXI Express. Simulátor na PXI Express má funkcionalitu navíc, ale hlavní architektura obou simulátorů (obr. 2) je podobná. Matematický model řízeného systému běží na hradlovém poli (FPGA). V FPGA jsou implementovány vstupní a výstupní funkce a představuje tak spojení mezi řídicí jednotkou a simulátorem. Systém reálného času zprostředkovává komunikaci mezi hostitelským PC a simulátorem (nastavení modelu a konstant). Komunikace probíhá prostřednictvím síťových proudů a sdílených proměnných.
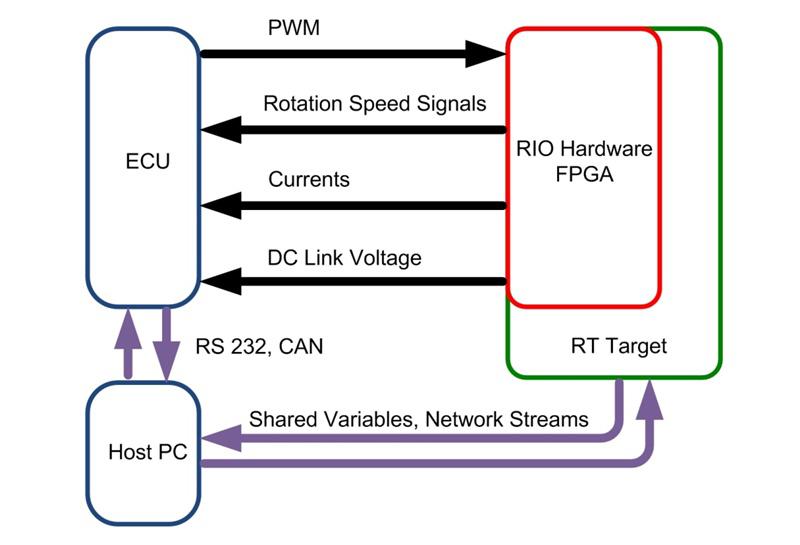
Obr. 2: Architektura simulátoru – schéma datového toku mezi hostitelským PC a dalšími systémy
Simulátor založený na PXI Express
Naším cílem bylo otestovat řídicí jednotku se stejnou verzí softwaru, která se používá v lokomotivě, bez jakéhokoliv podmíněného překladu pro testování. Abychom splnili tento požadavek, potřebovali jsme připojit řídicí jednotku ke kompletnímu řídicímu systému. Tento úkol vedl k dalším požadavkům na simulátor. Museli jsme vytvořit rozhraní mezi řídicím systémem ŠKODA Control System (ŠCS) a hardwarem NI. Rozhraní jsme použili k přizpůsobení signálů, neboť ŠCS používá speciální signály běžné v trakční technice, jako je proudová signalizace a digitální signál s vyšší hodnotou napětí logických úrovní a optických spojů.
Pro kompletní simulaci systému včetně všech rozhraní jsme zvolili hardware PXI Express. Jádro programu bylo stejné jako u simulátoru se systémem CompactRIO — se stejnými softwarovými moduly napsanými s pomocí modulu LabVIEW FPGA. Obr. 3 ukazuje celkový pohled na simulátor využívající platformu PXI Express. Výpočetní jednotku systému tvoří multifunkční modul rekonfigurovatelných vstupů a výstupů (RIO) NI PXI-7854R řady R. Šasi obsahuje další moduly, včetně modulu pro sběrnici CAN, modulu rychlých digitálních vstupů a výstupů, napájecích zdrojů a dodatečných analogových výstupů. Modul s napájecím zdrojem se používá pro nastavení správných napěťových úrovní logických vstupů na ŠCS. Modul CAN se používá pro komunikaci se systémem ŠCS. Modul analogových výstupů a modul rychlých digitálních vstupů a výstupů se používají pro speciální testy.
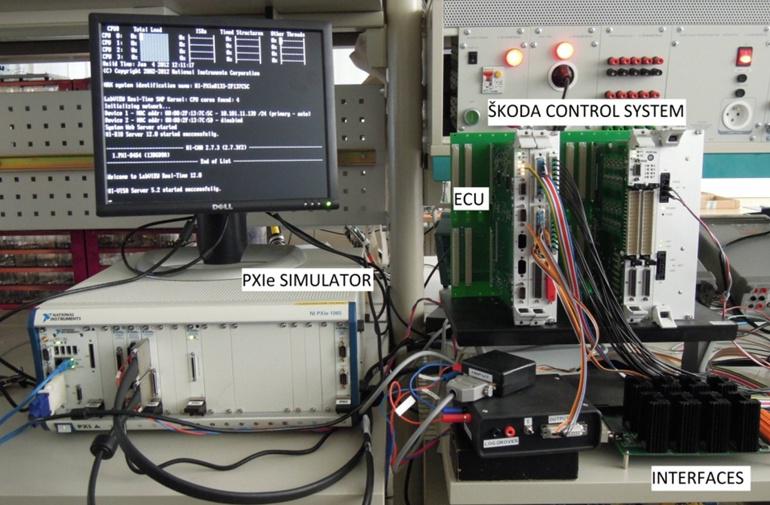
Obr. 3: Celkový pohled na propojení simulátoru na PXIe - rozhraní – řídicího systému ŠKODA
Simulátor založený na CompactRIO
Simulátor založený na systému CompactRIO představuje zjednodušenou verzi. Používá stejný výpočetní model na FPGA jako verze s PXI Express. Simulátor je navržen pro přímé připojení k řídicí jednotce (obr. 4), na rozdíl od verze na PXI Express. Jde o první verzi prototypu simulátoru pohonů vytvořeného společností ŠKODA. Postupy při tvorbě modelu byly validovány s použitím této verze a v dalším kroku byly přeneseny na platformu PXI Express. Výhodou této verze je snadná manipulace, malé rozměry a nízké náklady na potřebný hardware.
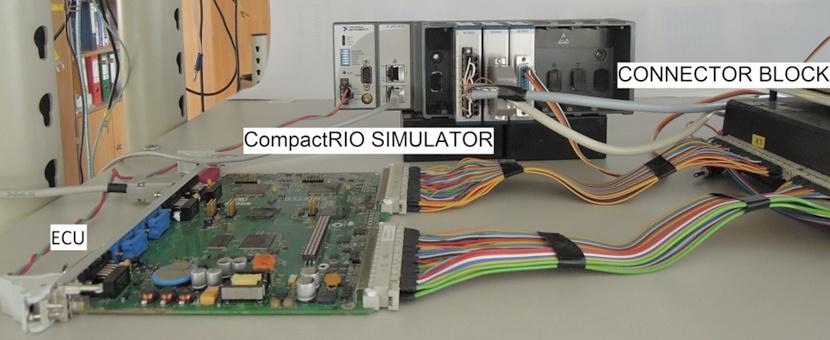
Obr. 4: Simulátor CompactRIO připojený přímo k řídicí jednotce, krabice na pravé straně je pouze konektorový blok, který slouží pro rozvod signálů
Tvorba modelu založeného na LabVIEW FPGA
Tato část představovala nejnáročnější část celého projektu. Proces tvorby modelů reálného času v obvodu FPGA klade na vývojáře vysoké nároky. Na platformě FPGA není možné pro tvorbu modelů používat simulační nástroje. Vstup vývojového procesu tvoří diferenciální rovnice, které jsou zpracovávány s použitím vhodné numerické metody pro řešení diferenciálních rovnic. Systém numerických rovnic je následně přenesen na platformu FPGA. Je důležité mít na paměti, že všechny operace probíhají za použití aritmetiky s pevnou desetinnou čárkou (FXP). S výhodou lze použít funkce z palety funkcí pro matematické výpočetní operace s vysokou propustností.
Implementace numerického matematického modelu na FXP aritmetice začíná ko-simulací simulovaného systému na vývojovém počítači a na FPGA. Ko-simulace se používá k ověření FXP modelu na FPGA. Jak již bylo zmíněno, model na FPGA provádí výpočty s FXP. Výsledky výpočtů silně závisí na bitové přesnosti mezivýpočtů. Proto je validace výsledků tak důležitá.
Jako nástroj pro ko-simulaci jsme použili LabVIEW Control Design and Simulation Module. Ko-simulace probíhala následujícím způsobem: FXP model a simulační smyčka byly volány v jednom VI. Model stejného systému na FPGA byl vytvořen v simulační smyčce vyvinuté s pomocí LabVIEW Control Design and Simulation Module. Možnost volat FPGA VI a simulační smyčky je pro vývojáře skutečně užitečná. Lze snadno pozorovat odchylky mezi modely a provádět potřebné úpravy kódu v LabVIEW. Soubory VI představující FPGA model jsou volány ve stejném VI jako simulační smyčka. Tato funkce LabVIEW pomáhá vývojářům, neboť jsou okamžitě vidět všechny numerické rozdíly mezi modely a lze upravit příslušné parametry.
Model v FPGA versus model s použitím LabVIEW Control Design and Simulation Module a cílového systému reálného času
Významnou výhodou FPGA modelů je možnost dosáhnout v simulaci krátkého časového kroku. Nevýhodou krátkého časového kroku je, že proces vývoje modelu je komplikovanější.
Model vytvořený v nástroji LabVIEW Control Design and Simulation Module a spuštěný na cílovém systému reálného času má také své výhody. Je složité dosáhnout stejného časového kroku jako na FPGA, ale proces vývoje je podstatně kratší. Model je tvořen pomocí spojování matematických bloků a není nutné psát ručně numerickou metodu. Další výhodou je, že všechny operace probíhají s datovým formátem double (64bitové číslo s plovoucí desetinnou čárkou).
Výhody simulátorů na platformě LabVIEW FPGA
Spojení mezi funkcemi v nástroji LabVIEW Control Design and Simulation Module a v nástroji LabVIEW FPGA Module nám pomohlo vytvořit a validovat přesný model hlavního pohonu lokomotivy. Simulátory nám pomohly vyhodnotit nové algoritmy pro řízení velkých pohonů a poskytly našim vývojářům více času pro testování softwaru. Zatím se nacházíme v raném stádiu vývoje a máme mnoho nápadů jak simulátor dále vylepšit. Projekt simulátoru byl využit poprvé v elektrické jednotce RegioPanther (obr. 5) při testování a validaci řídicího softwaru.

Obr. 5: Jednotka RegioPanther při testovací jízdě
Autor: Jan Švanda, Development Engineer, ŠKODA ELECTRIC a.s., Česká republika
ŠKODA ELECTRIC je předním světovým výrobcem elektrických motorů pro pohon a trakci trolejbusů, tramvají, lokomotiv, příměstských vlakových jednotek a důlních vozíků.
National Instruments (Czech Republic), s.r.o.
Tel: +420 224 235 774, Fax: +420 224 235 749
E-mail: ni.czech@ni.com, http://czech.ni.com
Bezplatný tel. v ČR: 800 267 267



