Řídicí jednotka musí dodávat vhodné signály do spínačů elektronického pohonu motoru (obvykle MOSFET tranzistory) a to s přesným časováním. Musí také řídit trajektorii náběhu/doběhu motoru a také detekovat a přizpůsobovat se měnící se zátěži motoru. Tento článek se zabývá řídicími integrovanými obvody pro motory BLDC. Poskytne celkový pohled na elektrické vlastnosti BLDC motorů a vysvětluje jejich řízení pomocí integrovaného obvodu řady Renesas RAJ306010.
Signálová cesta řízení motoru
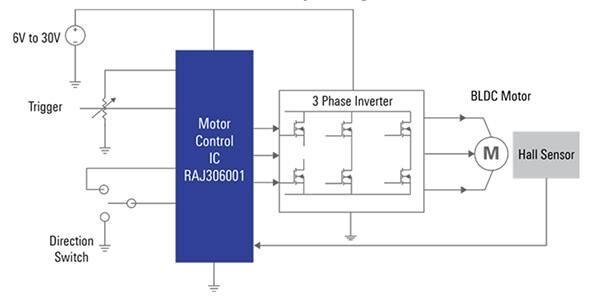
Signálová cesta začíná v řídícím procesoru, na kterém běží software, přes drivery pro spínání výkonových prvků, které jsou připojeny k motoru (obrázek 1). Může také existovat zpětnovazební signálová cesta od senzoru motoru k procesoru přes analogové obvody, které poskytují informaci o poloze nebo rychlosti rotoru.
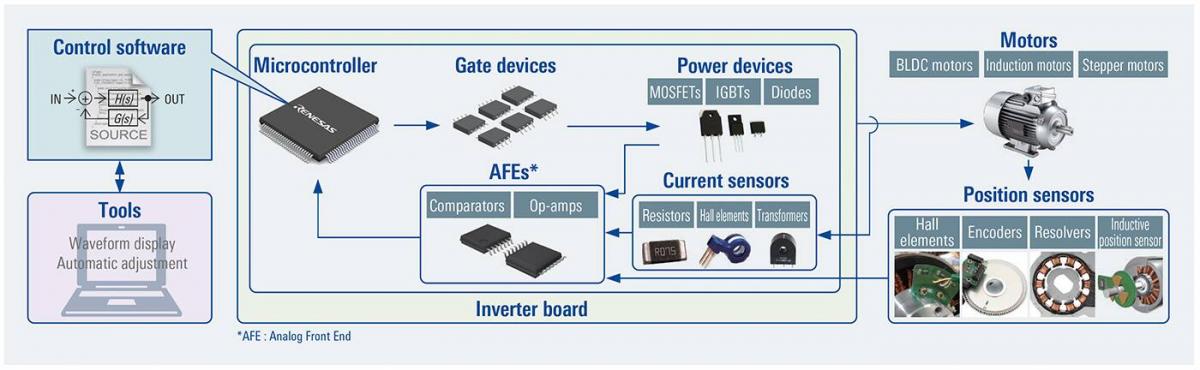
Obrázek 1: Řízení motoru začíná softwarem zabudovaným v procesoru, který ovládá výkonové drivery, které zase přepínají napájení do vinutí motoru. Může také existovat zpětnovazební smyčka z motoru zpět do procesoru. (Zdroj obrázku: Renesas)
Bezkomutátorový motor může být dvojího typu: BLDC motor a krokový motor. Oba fungují díky magnetické interakci mezi vnitřními permanentními magnety a přepínáním elektromagnetických cívek. Výběr toho, který z těchto dvou typů použít, závisí na jejich relativních výhodách a nevýhodách s ohledem na zamýšlenou aplikaci.
Obecně jsou BLDC motory vysoce spolehlivé, účinné a mohou dodávat velké množství točivého momentu v celém rozsahu rychlostí. Póly statoru jsou postupně napájeny, a to způsobí otáčení rotoru ( na kterém jsou permanentní magnety). Motory BLDC mají obvykle po obvodu tři elektronicky řízené statory (obrázek 2).
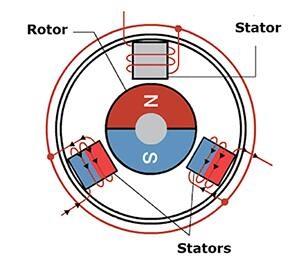
Obrázek 2: Statory motoru BLDC jsou napájeny v takovém pořadí, že se rotor s permanentním magnetem otáčí. (Zdroj obrázku: Renesas)
Mezi klíčové vlastnosti motoru BLDC patří rychlá odezva, rychlá akcelerace, spolehlivost, dlouhá životnost, vysokorychlostní provoz a velký výkon. Často jsou volbou v aplikacích, jako jsou lékařská zařízení, chladicí ventilátory, akumulátorové elektrické nářadí, gramofony a zařízení pro automatizaci. Krokový motor funguje podobně jako BLDC motor, až na to, že se pohybuje po částech (krocích). Plná rotace je rozdělena do velkého počtu stejných kroků (typicky 128 nebo 256).
Namísto kontinuálního otáčení je rotor motoru postupně poháněn tak, aby se pohyboval (krokoval) v těchto malých úhlových krocích (obrázek 3). To umožňuje přesné polohování rotoru, protože je synchronizován s magnetickým polem vytvářeným póly statoru.
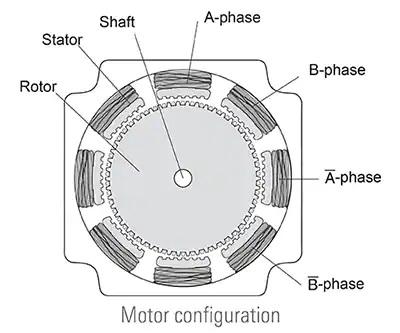
Obrázek 3: Krokový motor má velký počet pólů statoru, které jsou uspořádány kolem jeho rotoru a jejich permanentních magnetů. Buzením těchto pólů v řízeném sledu se rotor otáčí a postupuje v malých krocích – úhlech. (Zdroj obrázku: Renesas)
Krokové motory jsou spolehlivé, přesné a nabízejí rychlou akceleraci a odezvu. Vzhledem k jejich krokovému provozu a konstrukci motoru, řízení s otevřenou smyčkou a stabilita určité polohy postačují pro aplikace, jako jsou skenery, tiskárny a plotry. Pokročilé aplikace mohou přidat snímač zpětné vazby a řízení s uzavřenou smyčkou pro větší přesnost a výkon.
Možnosti řízení BLDC motoru
Na rozdíl od střídavých indukčních nebo kartáčovaných stejnosměrných motorů, kde primárním prostředkem pro řízení rychlosti a točivého momentu je úprava napájecího napětí, je BLDC motor řízen pečlivým načasováním sepnutí a rozepnutí výkonových MOSFETů. To umožňuje využít motor v široké škále aplikací. BLDC motory mohou pracovat ve vysokých otáčkách pro výkonné ventilátory nebo v elektrických nářadích (vrtačka, bruska), kde musí mít vysoký rozběhový moment. V mnoha aplikacích musí být motor také schopen zvládnout velké změny zatížení, které vyžadují rychlou dobu odezvy, aby byly zachovány konzistentní otáčky.
Pro ovládání BLDC motoru se používají dvě strategie. Základní 120⁰ on/off ovládání a vektorové ovládání. Při ovládání 120° on/off jsou dvě ze tří cívek motoru BLDC nabuzeny a šest schémat buzení se rotačně přepíná tak, aby bylo umožněno otáčení v obou směrech (obrázek 4).
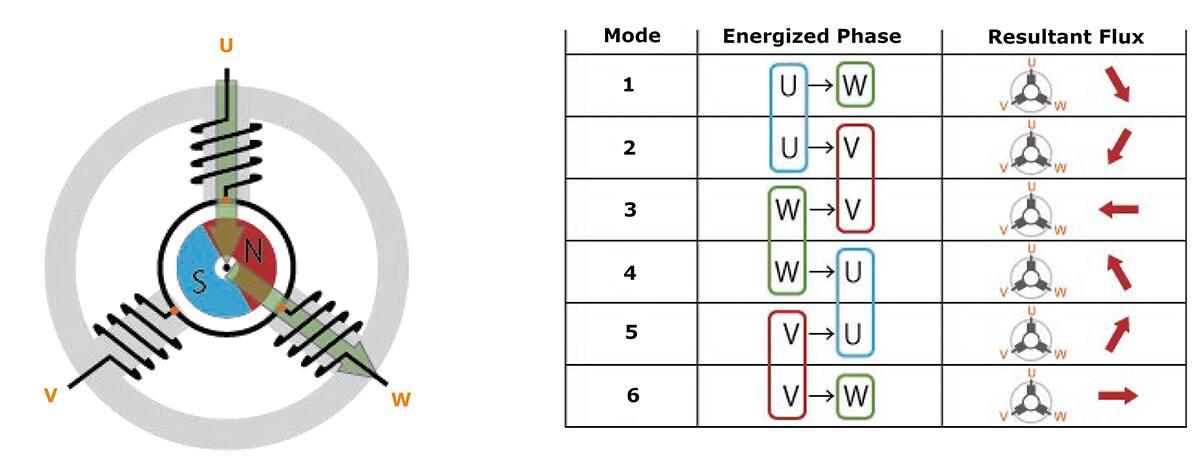
Obrázek 4: Póly statoru motoru BLDC (vlevo) mohou být napájeny buď po směru hodinových ručiček nebo proti směru hodinových ručiček (vpravo), a tím pohánět rotor v obou směrech podle požadavků aplikace. (Zdroj obrázku: Renesas)
V této strategii jsou cívky statoru napájeny proudem zapnuto/vypnuto (čtvercová vlna). To má za následek lichoběžníkový profil zrychlení. Když se motor rozběhne na příslušné otáčky, udržuje se rychlost a klesá, když jsou cívky bez napětí. Výhodou tohoto přístupu je jednoduchost a přímočaré ovládání.
Nevýhodou je však zranitelnost vůči kolísání výkonu se zatížením a dalšími změnami. Dále přesnost a účinnost nejsou pro některé aplikace dostatečně vysoké. Sofistikované algoritmy v driveru mohou tyto nedostatky do určité míry odstranit a to úpravou časování zapnutí/vypnutí MOSFETu a také použitím proporcionálně-integrálně-derivačního (PID) nebo proporcionálně-integrálního (PI) řízení.
Alternativou k této strategii je vektorové řízení, nazývané také řízení orientované na pole (FOC). Při tomto přístupu řízení jsou všechny tři cívky řízeně napájeny nepřetržitým rotujícím magnetickým polem, a to má za následek hladší pohyb ve srovnání s řízením o 120° on/off.
V FOC je proud do každé statorové cívky měřen a řízen pokročilými algoritmy, které vyžadují složité výpočty. Algoritmus musí také nepřetržitě transformovat hodnoty třífázového střídavého proudu na hodnoty dvoufázového stejnosměrného proudu (proces zvaný coordinate-phase conversion). Tím se zjednoduší následné výpočty potřebné pro řízení (obrázek 5). Výsledkem FOC, pokud se provádí správně, je vysoce přesné a efektivní řízení.
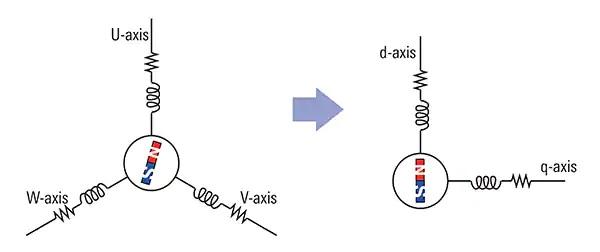
Obrázek 5: Část algoritmu FOC vyžaduje převod souřadnicové fáze pro zjednodušení složitých výpočtů. (Zdroj obrázku: Renesas)
Snímače pro zpětnou vazbu
BLDC motory lze ovládat v topologii otevřené smyčky bez signálu zpětné vazby nebo pomocí algoritmu s uzavřenou smyčkou se zpětnou vazbou ze snímače přímo uvnitř motoru. Rozhodnutí, zda použít zpětnou vazbu, je otázkou přesnosti, spolehlivosti a bezpečnosti. Přidání snímače do zpětné vazby zvyšuje náklady a složitost algoritmu, ale zvyšuje spolehlivost. A to je v mnoha aplikacích nezbytné. V závislosti na aplikaci je hlavním parametrem pohybu buď poloha rotoru, nebo rychlost. Tyto dva faktory spolu úzce souvisejí. Rychlost je časovou derivací polohy a poloha je časovým integrálem rychlosti.
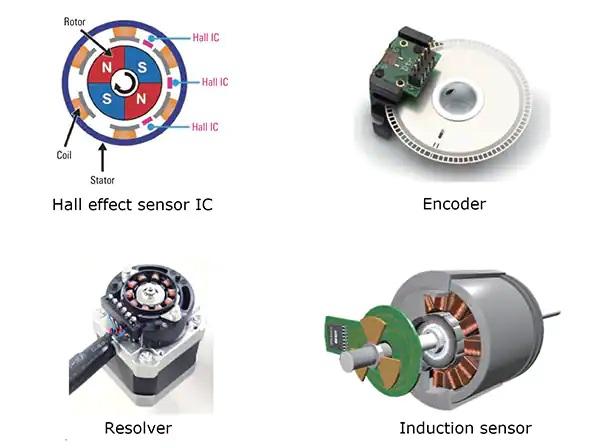
Ve skutečnosti téměř všechny zpětnovazební senzory indikují polohu a regulátor může jejich signály přímo použít nebo použít derivaci k určení rychlosti. V jednodušších případech je primární úlohou zpětnovazebního senzoru spíše bezpečnostní kontrola motoru. Běžně se používají čtyři typy zpětnovazebních snímačů. Senzor na principu Hallova jevu, optické kodéry, resolvery (Resolver je typ rotačního elektrického transformátoru) a indukční snímače (obrázek 6). Každý nabízí jiné vlastnosti, rozlišení a cenu.
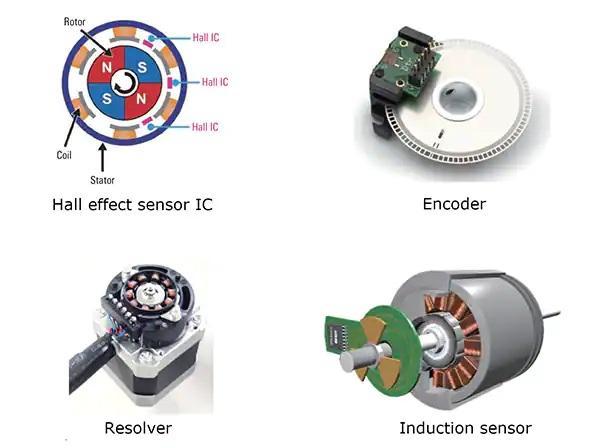
Obrázek 6: Uživatelé mají širokou škálu snímačů pro zpětnou vazby. Od senzorů s Hallovým efektem po kodéry, resolvery a indukční snímače. (Zdroj obrázku: Renesas)
Senzory s Hallovým jevem jsou obecně považována za nejjednodušší, nejsnadněji se instalují a jsou vhodné pro mnoho situací. Optické kodéry jsou k dispozici s řadou rozlišení, od nízkých po středně vysoké, ale mají problémy s instalací a mohou mít určité dlouhodobé problémy se spolehlivostí. Resolvery a indukční snímače jsou větší, těžší, dražší a mají určité problémy s rozhraním, ale poskytují velmi vysoké rozlišení a dlouhodobý výkon.
Výkonová část řízení motoru
Póly bezkomutátorových motorů – ať už BLDC nebo krokových – jsou elektromagnetické „cívky“, a proto musí být buzeny proudem než napětím. Aby byly tyto póly správně napájeny, musí řídicí systém motoru dodávat tento proud pomocí spínačů (ve většině případů MOSFET tranzistor) s přesným časováním, aby se motor správně a efektivně pohyboval. MOSFETy se musí chránit proti různým poruchovým stavům, jako je zastavení motoru, nadměrné proudové špičky, tepelné přetížení či zkrat. U relativně malých motorů, které obvykle vyžadují méně než 500 mA až 1 A, by bylo možné použít drivery tranzistorů i samotné výkonové MOSFETy v jednom integrovaném obvodu. I když by to zjednodušilo návrh, v mnoha případech to není praktické:
- Polovodičová struktura pro vysoce výkonné MOSFETy je velmi odlišná od struktury používaných pro digitální logiku driveru.
- Ztrátový výkon výkonových tranzistorů MOSFET zvyšují teplotu integrovaného obvodu a do značné míry by ovlivňovala integrované drivery. Proto je lepší oddělit digitální a výkonovou část.
- Jak se úrovně proudu vyžadované motorem zvyšují, může dojít k poklesu napětí v napájecích vodičích motoru. Proto je vhodné umístit spínací tranzistory blíže k zátěži čili blíže k motoru.
Z výše uvedených důvodů mnoho integrovaných obvodů pro řízení motoru obsahuje všechny potřebné funkce, kromě výkonových MOSFETů.
Integrované obvody pro řízení motoru
V minulosti bylo nutné pro řízení motoru použít sestavu integrovaných obvodů. Dnešní integrované obvody pro řízení motoru zvládnou vše v jediném čipu. Příkladem je integrovaný obvod RAJ306010 od Renesasu (obrázek 7), který obsahuje mnoho funkčních bloků, které se specificky zaměřují na jedinečné potřeby řízení motoru.
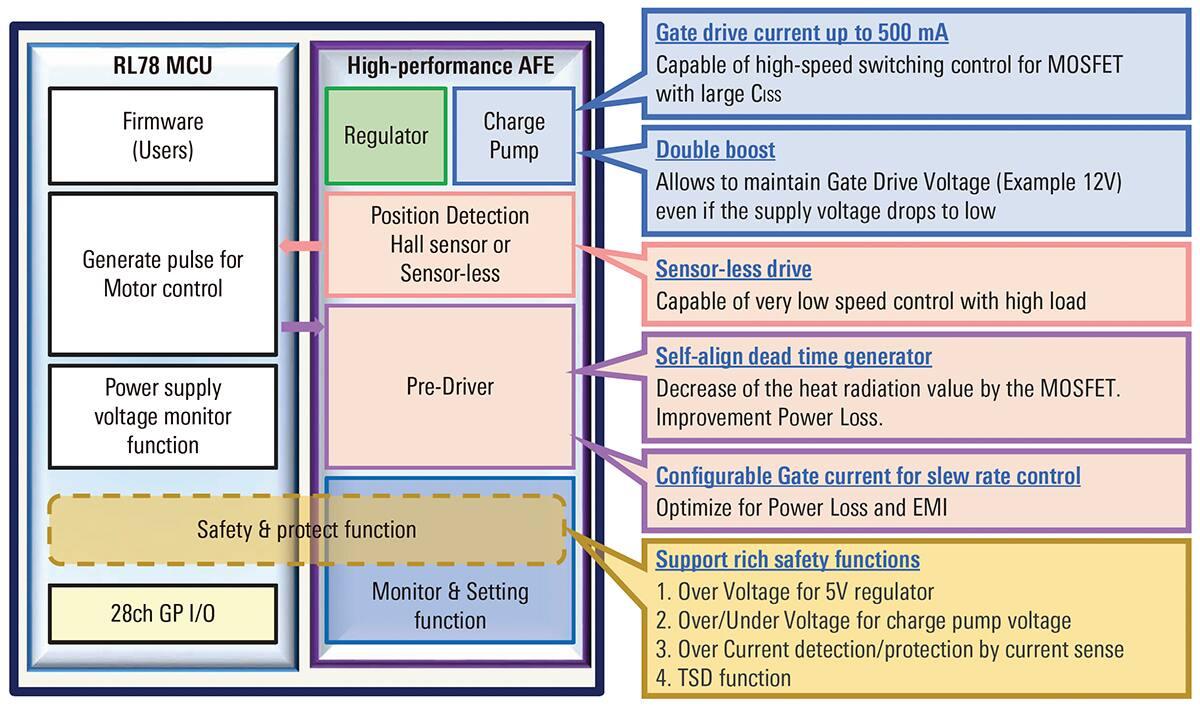
Obrázek 7: IC Renesas RAJ306010 má veškeré funkce pro pokročilé řízení motoru (kromě výkonových MOSFETů). (Zdroj obrázku: Renesas)
Tento integrovaný obvod je určen pro řízení třífázových bezkomutátorových stejnosměrných motorů. Velikost 64 pinového QFN pouzdra je 8x8 mm. Napájecí napětí je v rozmezí od 6 do 24 V, a proto je vhodný pro elektrické nářadí, zahradní nářadí, vysavače, tiskárny, ventilátory, čerpadla a robotiku. (Téměř identický integrovaný obvod RAJ306001 má napájecí napětí v rozmezí od 6 do 30V)
Na digitální straně RAJ306010 je 16bitový mikrokontroler RL78/G1F, který obsahuje 64 Kbytes paměť Flash, 4 kB paměť ROM a 5,5 kB paměti RAM, několik I/O pro všeobecné použití (GPIO), rozhraní SPI, I2C a UART. K dispozici je také devíti-kanálový, 10bitový analogově-digitální převodník (ADC). Veškeré konfigurační parametry se uloží do příslušných řídicích registrů paměti Flash, aby se vytvořily požadované provozní režimy. Poté je pak integrovaný obvod připraven fungovat ihned po zapnutí bez nutnosti zásahu mikrokontroleru, jak je vidět na blokovém schématu (obrázek 8).
Obrázek 8: Blokové schéma aplikace využívající RAJ306001 ukazuje, jak lze minimalizovat použití dalších diskrétních komponent. (Zdroj obrázku: Renesas)
Analogová strana RAJ306010 obsahuje tři drivery polovičního můstku s nastavitelným špičkovým proudem hradla až 500 mA, funkci samonastavitelného generátoru mrtvého času, aby se zabránilo poškození můstku, snímač proudu a zpětný EMF zesilovač. Integrovaná nábojová pumpa zesiluje dodávané napětí na gate tranzistoru na hodnotu až 13 V. K dispozici je přímá podpora pro senzory s Hallovým jevem a analogový front-end (AFE) lze také použít k podpoře jiných typů senzorů ve zpětné vazbě. Nesmí chybět ochranné funkce v podobě ochrany proti přehřátí, přepětí/podpětí (UVLO), detekce nadproudu a ochrany proti zablokování motoru.
Příklad na obrázku 9 ukazuje, jak si RAJ306010 snadno poradí s řízením motoru 24voltového akumulátorového mixéru. Většina obvodů se věnuje nabíjení a správě osmi-článkové baterií. Pro řízení motoru se použije pouze řídicí integrovaný obvod, externí třífázový můstek (střídač), obvod zpětné vazby pro snímání napětí a uživatelské tlačítko „start“.
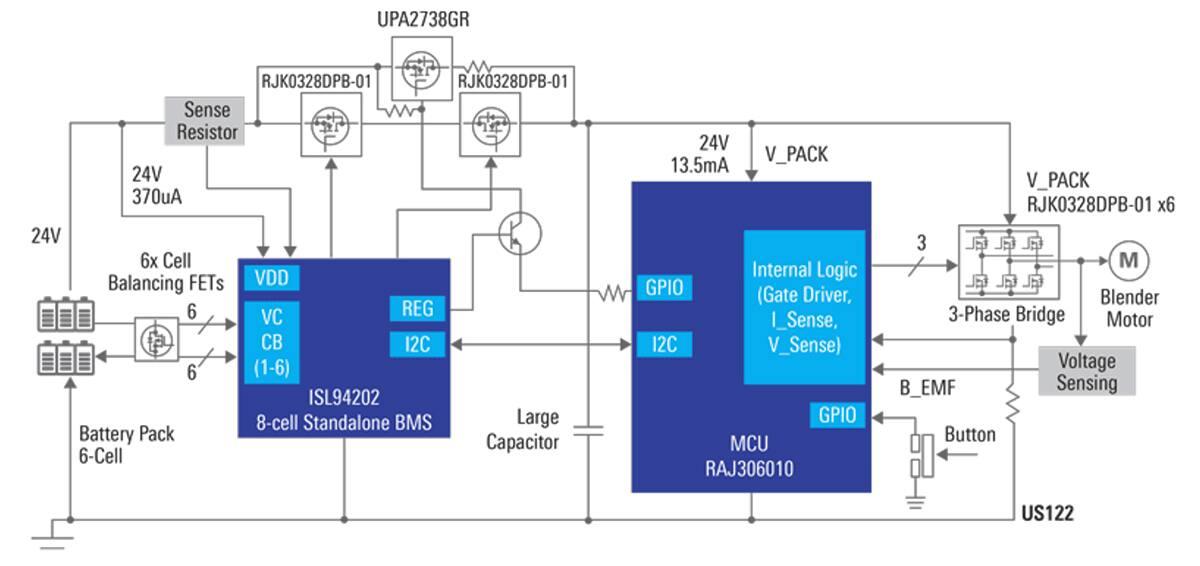
Obrázek 9: RAJ306010 jasně ukazuje, jak málo přídavných prvků je potřeba pro řízení motoru bateriového mixéru. (Zdroj obrázku: Renesas)
Vývojová sada pro ovládání motoru BLDC
Jedna věc je provést návrh na papíře nebo na PC pomocí modelů a druhá věc je řídit skutečný motor a testovat jeho výkon, zatížení a dynamiku pomocí různých nastavení počátečních podmínek spouštění. Pro tyto účely existuje vývojová sada RTK0EML2C0S01020BJ (obrázek 10) spolu se software pro snadné ladění Renesas Motor Workbench. Tento softwarový nástroj umožní seznámit se s provozem RAJ306010, jeho režimy a funkcemi.
Obrázek 10: Tato sada RTK0EML2C0S01020BJ spolu se software Renesas Motor Workbench umožňuje jemné ladění parametrů integrovaného obvodu RAJ306010. (Zdroj obrázku: Renesas)
Součástí vývojové sady nesmí chybět BLDC motor 24 V/420 mA s otáčkami naprázdno 3900 ot./min a jmenovitým točivým momentem 19,6 mN-m. Renesas také poskytuje řídící softwarové rutiny pro bezsenzorové i senzorové řízení.
Závěr
Aby bylo možné plně využít potenciál BLDC motoru je nutné použít spolehlivý přesný a dostatečně rychlý driver pro řízení výkonových tranzistorů MOSFET. Integrovaný obvod RAJ306010 od Renesasu, podporovaný vývojovými sadami a softwarem, výrazně zjednodušuje celkový design. Poskytuje vysoký výkon v malém QFN pouzdře o rozměrech 8 x 8 mm a zároveň nabízí efektivní řízení motoru BLDC.
Další informace:
- BLDC Motor Control Algorithms
- RTK0EML2C0S01020BJ BLDC Motor Control Evaluation System for RAJ3060xx Motor Control ICs
- Application Note R01AN3786EJ0102, “Sensorless Vector Control for Permanent Magnet Synchronous Motor (Algorithm)”
- Portable Power Tools Solution
- 24V Cordless Blender
- Motor Solutions: User-Friendly Motor Control Development Environment to Shorten Time to Market
Článek vyšel v originále na webu DigiKey.com, autorem je Billa Schwebera.




Komentáře
BLDC - BLCD
Pěkný článek,
nějak se tam ale pletou dvě zkratky správně je pokud se nepletu BLDC a nikoliv BLCD
Ach ty zkratky
Děkuji moc za upozornění. Mělo by to být opraveno. Jsem rád, že se i s překlepy článek líbíl.