
 Elektrická kola přinášejí moderní a ekologický způsob přemísťování po ulicích velkých měst a díky svým vlastnostem zažívají dříve nebývalý boom. Především v Číně se jich dnes během jediného roku prodá více než 25 miliónů. Podobnou expanzi však můžeme zaznamenat i jinde ve světě. Například v Německu se jen za poslední rok prodej elektrických kol zvýšil o více než 30 %! Díky jejich relativně vyšší ceně dnes tvoří značný podíl tržeb v celém odvětví jízdních kol. Stále větší oblibě se však těší nejen prodej kompletních elektrických kol, ale i sad, určených pro montáž na klasické jízdní kolo.
Elektrická kola přinášejí moderní a ekologický způsob přemísťování po ulicích velkých měst a díky svým vlastnostem zažívají dříve nebývalý boom. Především v Číně se jich dnes během jediného roku prodá více než 25 miliónů. Podobnou expanzi však můžeme zaznamenat i jinde ve světě. Například v Německu se jen za poslední rok prodej elektrických kol zvýšil o více než 30 %! Díky jejich relativně vyšší ceně dnes tvoří značný podíl tržeb v celém odvětví jízdních kol. Stále větší oblibě se však těší nejen prodej kompletních elektrických kol, ale i sad, určených pro montáž na klasické jízdní kolo.
Termín „elektrické jízdní kolo“ se může dále dělit na několik typů, uvedených i s jejich oficiálním názvem v následující tabulce. Norma EN 15194 definuje pojem EPAC - "Electrically Pedal Assisted Cycle". Termín Pedelec označuje klasická jízdní kola, doplněná pomocným elektromotorem, kde je regulace pohonu uskutečňována na základě snímání pohybu šlapek. E-bike potom kola, navržená přímo s elektrickým pohonem a řízená rukojetí či páčkou akcelerátoru (nebo plynu, jak jsme zvyklí z auta). Součástí tabulky je rovněž přehled několika nejdůležitějších charakteristik, platných v Německu.
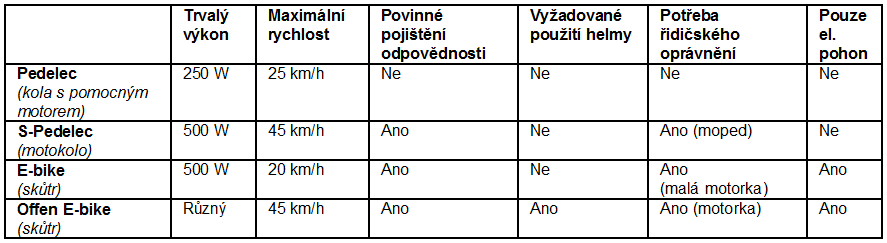
Obr. 1: Srovnání základních typů elektrických jízdních kol
My se však dále omezíme pouze na jednotný název - elektrické kolo.
Řídicí systém elektrického kola
Nyní si popíšeme základní strukturu elektrického kola.
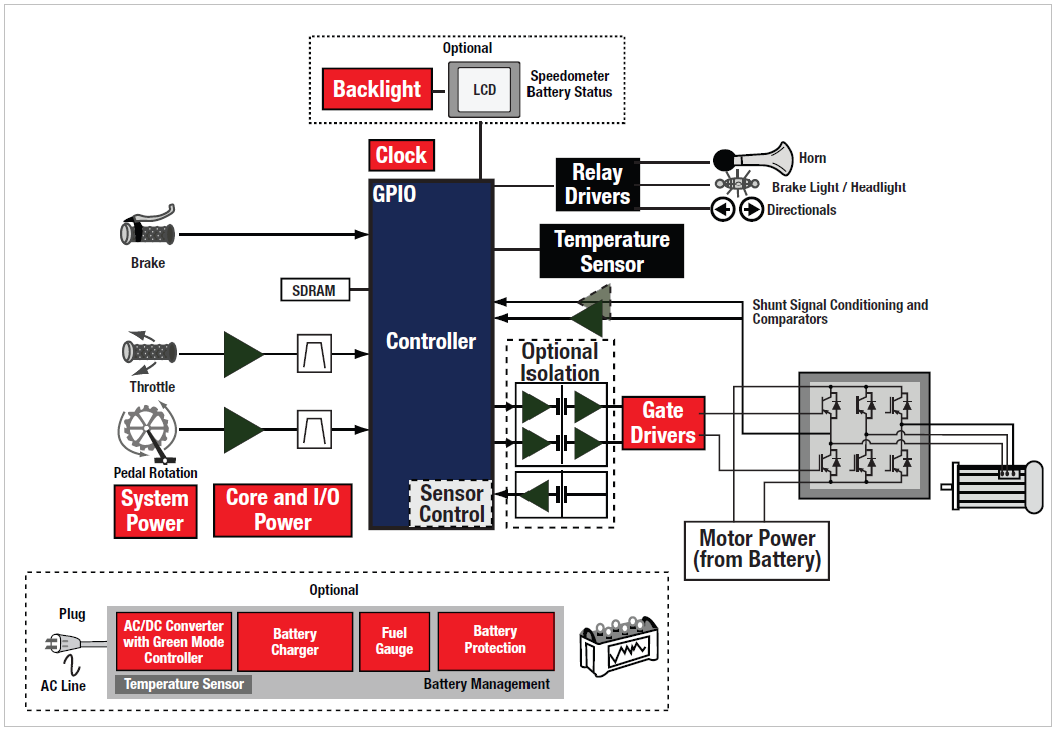
Obr. 2: Systém elektrického kola
Energie z napájecí baterie je využívána k pohonu elektromotoru i k napájení řídicího elektronického systému. Jednotlivé provozní stavy jsou řízeny mikrokontrolérem, který má veškerou distribuci napájecího napětí na starosti. Řídicí signály, používané k jízdě, jsou generovány buď prostřednictvím rukojeti nebo páčky akcelerátoru (elektrické kolo) nebo rychlosti a aktuálního momentu pedálů (pedelec). Nicméně vyšší prioritu má samozřejmě brzdný systém. Jeho funkce spočívá v odpojení budicího signálu od elektromotoru a jeho přepnutí do funkce generátoru. Tím se kinetická energie kola využije při každém brzdění.
Uživatel, v tomto případě cyklista, je o aktuálním provozním stavu informován prostřednictvím volitelného LCD displeje a ovládacích prvků. V každém případě by měl mít přehled o zbývající energii v akumulátoru a maximálním dojezdu.
Elektrické kolo, jako každé akumulátorové zařízení, potřebuje nabíjet. Jelikož se většinou nepředpokládá nabíjení po cestě, je nabíječka obvykle řešena jako samostatné, externí zařízení. Z tohoto důvodu se jí dnes nebudeme podrobně věnovat a zaměříme se výhradně na elektrickou výbavu kola.
Baterie
![]() Typické hodnoty napětí akumulátorů na elektrických kolech jsou 24 V, 36 V nebo 48 V. Kromě stále používaných olověných (Pb) a nikl-metal-hydridových (NiMH) akumulátorů jsou dnes jako zdroj energie mnohem častěji používány lithium-iontové (Li-ion), lithium-polymerové (LiPo) nebo lithium-železo-fosfátové (LiFePO4 ) baterie. Ty totiž nabízejí nejen mnohem vyšší energetickou hustotu, ale také nízké samovybíjení a výrazně vyšší počet nabíjecích cyklů (cca 1 000 – 2 000). Nevýhodou je potřeba systému správy baterií (BMS – Battery Management System), který jednotlivé články chrání před účinky přepětí či podpětí a umožňuje i korekci rovnovážného stavu (rovnoměrného rozložení akumulované energie). Systém je nezbytný především pro lithium-iontové baterie, neboť jinak hrozí jejich poškození a v krajním případě i exploze.
Typické hodnoty napětí akumulátorů na elektrických kolech jsou 24 V, 36 V nebo 48 V. Kromě stále používaných olověných (Pb) a nikl-metal-hydridových (NiMH) akumulátorů jsou dnes jako zdroj energie mnohem častěji používány lithium-iontové (Li-ion), lithium-polymerové (LiPo) nebo lithium-železo-fosfátové (LiFePO4 ) baterie. Ty totiž nabízejí nejen mnohem vyšší energetickou hustotu, ale také nízké samovybíjení a výrazně vyšší počet nabíjecích cyklů (cca 1 000 – 2 000). Nevýhodou je potřeba systému správy baterií (BMS – Battery Management System), který jednotlivé články chrání před účinky přepětí či podpětí a umožňuje i korekci rovnovážného stavu (rovnoměrného rozložení akumulované energie). Systém je nezbytný především pro lithium-iontové baterie, neboť jinak hrozí jejich poškození a v krajním případě i exploze.
Management baterií s obvody BQ76PL900 a BQ76PL114
Jelikož se napětí jednotlivých bateriových článků pohybuje v rozmezí asi od 2,5 do 4 V (jmenovité napětí je 3,6 V), musí být řazeny sériově. Například pro získání 36 V napětí je potřeba 10 článků. Nicméně, jelikož se kapacita jednotlivých článků může lišit, zvláště pak s přibývajícím věkem, musí být každý monitorován a řízen samostatně. V první řadě se tím zabraňuje přílišnému vybití nebo naopak nerovnoměrnému nabití a s tím souvisejícím bezpečnostním rizikům. Pro tento účel jsou k dispozici speciální systémy, určené pro správu bateriových článků i celých baterií. Dnes je jich na trhu celá řada; liší se především dostupností funkcí, jako je sledování článků s ohledem na přepětí, podpětí, nadměrný proud nebo zkrat. Stejně tak jsou dnes běžně dostupné kompletní bateriové sady, které tyto obvody integrují ve svém pouzdře.
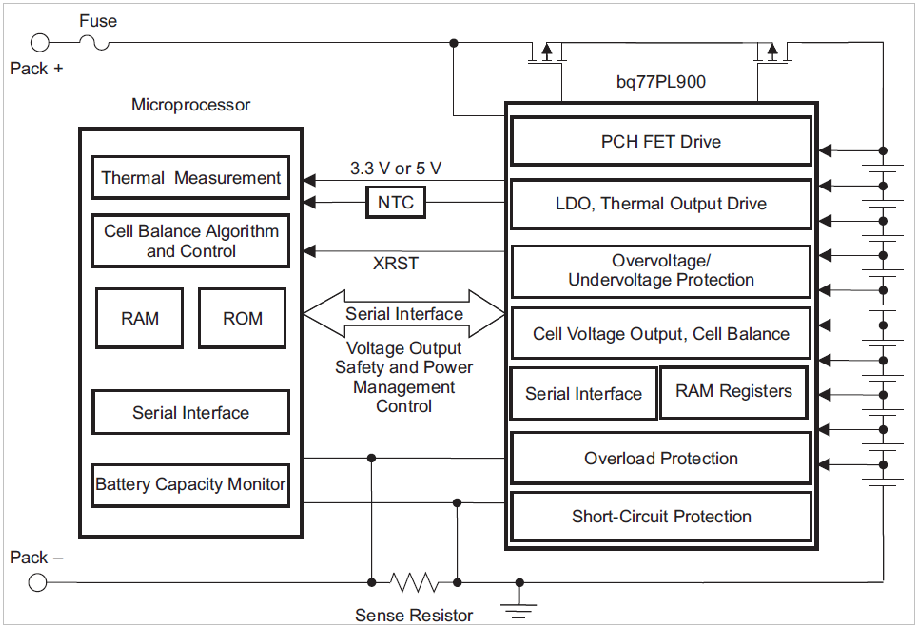
Obvody bq77PL900 od společnosti Texas Instruments tvoří plně integrované řešení těchto funkcí a to až pro 10 lithiových článků. Po doplnění o spínač typu FET podporují možnost úplného odpojení baterie od systému, například v případě selhání. Jednotlivé prahové hodnoty napětí a proudů, stejně jako další nabízené funkce, jsou programovatelné přes sériové rozhraní I2C a snadno tak přizpůsobitelné různým typům bateriových článků. Integrovaný regulátor obvodu poskytuje napětí 5 V a 3,3 V, vhodné pro přímé napájení některých externích komponent, jako je například malý mikrokontrolér. Obvod pak může pracovat jak ve zcela autonomním režimu, tak i v režimu řízeném mikrokontrolérem. V tom případě může být provozován jako analogový front-end (AFE).
Řízením obvodu z mikrokontroléru získáme flexibilitu, potřebnou pro sofistikované algoritmy řízení napájecí baterie. Zároveň je možné provádět další konfiguraci i během vlastního provozu, například v závislosti na aktuálně dostupné kapacitě baterie, apod. Výjimkou pak není ani řízení podle točivého momentu motoru, při kterém jsme schopni dosáhnout optimálního využití energie.
Udržování rovnováhy mezi jednotlivými články napájecí baterie je výhodné i po ekonomické stránce. Běžně totiž slabší články (s nižší kapacitou) dosáhnou při nabíjení maximálního napětí jako první a nabíjecí proces je ukončen a to i přesto, že zbylé články (s vyšší kapacitou) nejsou ještě plně nabité. Uživatel tak nemá dostupnou energii z celé kapacity baterie, která je jinak stále k dispozici. Podobná situace panuje i při vybíjení, kdy článek s nejnižší kapacitou dosáhne spodní hranice napětí jako první a proces musí být ukončen i u ostatních článků.
Obvod bq77PL900 proto nabízí funkci tzv.
- pasivní nabíjecí rovnováhy,
tj. pokud nejslabší článek dosáhne při nabíjení své maximální hodnoty, je další nabíjení soustředěno na zbylé články. Mnohem elegantnější metodu pak poskytuje tzv.
- aktivní výstupní rovnováha.
To je stav, kdy jsou slabší články aktivně dobíjeny energií ostatních článků. Tato funkce je dostupná například u obvodu bq78PL114, prostřednictvím patentované technologie TI PowerPump™. Energie je mezi jednotlivými buňkami převáděna s vysokou účinností spínaných regulátorů a nedochází tak ke ztrátám jako v případě pasivní metody. Tím z celé baterie získáme mnohem více energie a na elektrickém kole dojedeme dál (viz také článek Jak aktivně pečovat o Li-Ion články).
Elektromotor
V případě montáže elektromotoru na jízdní kolo se dnes používá několik systémů. Přímé umístění na náboj předního nebo zadního kola je zvláště vhodné pro domácí sady. Výhodou je jednoduchá montáž, nevýhodou pak nerovnoměrné rozložení hmotnosti na kole. Tento problém mizí při umístění pohonné jednotky na spodní rám kola, avšak takové řešení je výrobně složitější a tedy i dražší.
Mezi nejčastěji používané typy motorů patří bezkomutátorové stejnosměrné motory (BLDC), které mají výhodu v relativně jednoduchém a nezávislém řízení rychlosti a točivého momentu. Plný točivý moment je u nich totiž dostupný v celém rozsahu otáček.
Motor je během startu řízen prostřednictvím jednoduchého komutačního bloku. Zde se plné napětí napájecí baterie používá pro vytvoření lichoběžníkového signálu tak, aby jednotlivé fáze motoru mohly produkovat maximální točivý moment. Pro optimalizaci lze použít vektorové řízení (FOC - Field-oriented Control). Dále se pak může výkon během jízdy podle potřeby snížit nebo se může využít klasického řízení pomocí PWM signálu.
Měření polohy rotoru a rotorové rychlosti je řešeno buď senzorově (například s využitím tzv. Hallova jevu) nebo bezsenzorově (měřením proudů motorem). Tato metoda je, zejména při nízkých otáčkách, bohužel poměrně náročná.
Mikrokontrolér C2000 Piccolo
Pro řízení motorů je dostupná speciální řada mikrokontrolérů společnosti Texas Instruments – C2000 Piccolo. Obvody, přesto že využívají jednotné hardwarové platformy, nabízejí vysokou flexibilitu a podporu většiny typů motorů. Sofistikované výpočetní algoritmy mohou navíc zajistit lepší kroutící moment motoru a dokonalejší rekuperační brzdění (což má opět pozitivní vliv na kapacitu baterie). V současné době se zároveň pracuje na vývoji algoritmů pro bezsnímačové měření, spolehlivě pracující i při nízkých otáčkách motoru.
Obvody díky vysoké úrovni systémové integrace podporují jak bezsnímačové řešení, tak i použití levných senzorů. K dispozici jsou především PWM moduly s rozlišením až 150 ps nebo A/D převodníky s rychlostí až 12,5 Msps. Zájemcům je dostupná bohatá softwarová knihovna „Control Suite“, implementující ucelené řídicí algoritmy různých typů motorů a podporující celou řadu vývojových kitů (viz také např. článek controlSUITE aneb pozoruhodné možnosti programování MCU, controlSUITE – SW balík pro real–time aplikace, příp. Nová eval. platforma pro buzení kartáčových DC nebo krokových motorů, vše na stránkách hw.cz).
Centrální ovládání a uživatelské rozhraní
V moderních elektrických kolech bývá lidská síla přiměřeně využívána v interakci se silou elektromotoru. Pro tento účel se na pedály umísťují senzory rychlosti, kadence a otáčivého momentu, ze kterých se informace přenášejí dále do centrální řídicí jednotky. Rovněž je potřeba správně vyhodnocovat brzdění i volnou jízdu bez šlapání. Například při pomalé jízdě do kopce je dobré zvýšit točivý moment šlapek, ale nikoliv při pomalé jízdě po rovině. Veškeré tyto funkce, včetně řízení motoru a baterie, jsou podporovány uvedenou řadou mikroprocesorů C2000 Piccolo. Zobrazovací jednotku, informující o aktuálním stavu baterie nebo třeba úrovni podpory elektrického systému (může být i více než 100 %), lze například připojit přes standardizovanou sběrnici CAN nebo využít bezdrátového přenosu.
Shrnutí
Elektrická kola představují osobní dopravní prostředek, který je šetrný k životnímu prostředí a například v Německu je jejich prodej na vzestupu. Využitím moderních polovodičových prvků pro správu baterií můžeme nejen zvýšit dojezd, ale zlepšit i odezvu motoru a tím zpřesnit a zjednodušit jeho ovládání.
Autor článku: Frank Forster, Business Development Manager Texas Instruments pro embedded aplikace



