
![]() Velmi přesné aplikace bývají v běžném životě sužovány (utlačovány nebo také trápeny; jiné je zužovat – činit úzkým, ikdyž určitá míra úzkosti na nás může padat i ve smyslu prvém) mnoha zdroji chyby v čele s chybou zesílení (Gain Error). Dlouhodobá praxe naštěstí naučila vývojáře několika způsobům vhodné obrany. Běžnou možností se stala digitální kalibrace, která však vnáší přídavnou chybu a s ní i nutnost navýšit rozlišení pro účinnou kompenzaci způsobu úpravy chyby první. Kalibraci lze také provádět trimováním základního stavebního kamene každého systému s datovým převodníkem – napěťové reference, tj. způsobem, který již další chybu vnášet nemusí. Článek proto popisuje způsob nastavení napěťové reference v součinnosti s digitálním potenciometrem. Zmíněna bude rovněž i varianta v podobě kalibrace digitální.
Velmi přesné aplikace bývají v běžném životě sužovány (utlačovány nebo také trápeny; jiné je zužovat – činit úzkým, ikdyž určitá míra úzkosti na nás může padat i ve smyslu prvém) mnoha zdroji chyby v čele s chybou zesílení (Gain Error). Dlouhodobá praxe naštěstí naučila vývojáře několika způsobům vhodné obrany. Běžnou možností se stala digitální kalibrace, která však vnáší přídavnou chybu a s ní i nutnost navýšit rozlišení pro účinnou kompenzaci způsobu úpravy chyby první. Kalibraci lze také provádět trimováním základního stavebního kamene každého systému s datovým převodníkem – napěťové reference, tj. způsobem, který již další chybu vnášet nemusí. Článek proto popisuje způsob nastavení napěťové reference v součinnosti s digitálním potenciometrem. Zmíněna bude rovněž i varianta v podobě kalibrace digitální.
Problém zvaný chyba zesílení (Gain Error)
Rozlišení (Resolution) a přesnost (Accuracy) jsou dvě samostatné věci. Přesto zde ale platí následující úměra: Převodníky s vysokým rozlišením budou obvykle přesnější než jejich protějšky s rozlišením nižším. Je zde ale stále na co odpovídat, protože aplikace s malým rozlišením mohou být také docela dobře velmi přesné, mohou používat jakostní a přívlastkové referenční zdroje a také se rády nechají řádně nakalibrovat.
Existuje celá řada chyb i jejich zdrojů. Chyba zesílení pak mezi nimi s radostí vynikne. Je definována jako odchylka od teoretické (ideální) úrovně pro nejvyšší kód, ignorujíce chybu offsetu (Offset Error), přesně jak je to naznačeno na přiloženém obrázku pro D/A převodník. V případě A/D převodu bude definice vedena stejnou cestou.
Chyby, které vnáší zesílení a také offset
Digitální kalibrace chyby zesílení
Chyba zesílení má svůj původ v neideální povaze zisku analogového, signálového řetězce a také nedokonalostech napěťové reference. Jednu z možností, kterak proti ní bojovat, představuje digitální kalibrace. Určitou nevýhodou však zůstává požadavek na větší rozlišení převodníku, což může docela dobře zahýbat s výslednou cenou celého systému.
Zmíněný digitální přístup lze vhodně demonstrovat na níže zveličeném a místy také záměrně vyhroceném příkladu. Systém se skládá z ideálního D/A převodníku (DAC) a reálného, výstupního, analogového zesilovače. Pro názornost předpokládejme rozlišení DAC na celé čtyři bity.
Systém, na kterém demonstrujeme digitální kalibraci zesílení
Ze všeho nejdříve předpokládejme ideální případ, ve kterém položíme rovnost mezi chybu zesílení systému a nulu. Av nechť je rovno jedné. Bude – li narůstat vstupní kód DAC, zaznamenáme odpovídající navýšení výstupního napětí a to až do velikosti 2.5 V, kterou definuje napěťová reference (Vref = 2.5 V). Nyní se vraťme zpět do trpké reality, ikdyž poněkud nadnesené. Definujme si zesílení Av o velikosti 1.1, tj. pracujme s chybou zesílení Gain Error = 10 %. Výstup nám opět poroste jako v předchozím případě, ale na 15. kódu nově dostaneme výstupní napětí Vout o velikosti 2.75 V. Pro vyřešení této situace lze nyní systém digitálně nakalibrovat, tj. modifikovat kód D/A převodníku pomocí lookup tabulky, případně implementovat vhodný algoritmus. Pro úpravu zisku z 1.1 zpět na celkové zesílení 1.0 násobme kód poměrem 1 / 1.1 = 0.909. Přiložený obrázek v této souvislosti zachycuje také ideální, nekalibrovaný průběh spolu s kalibrovanou odezvou skutečného systému.
Digitální kalibrace systému s D/A převodníkem
Na obrázku vidíme ideální výstup D/A převodníku a také nekalibrovanou charakteristiku s chybou zesílení +10 %. Vhodnou úpravou vstupujícího kódu pak lze nežádoucí 10 % vliv odstranit. Za vše krásné se ale něčím platí. Celý problém je jasně vidět při pohledu na kalibrační kódy a připojené nelinearity –
- diferenciální DNL (Differential Non-Linearity ) a
- integrální INL (Integral Non-Linearity).
DAC kód začíná růst a kopíruje výchozí hodnoty. DNL přitom vykazuje neměnnou, kladnou velikost 0.1 LSB. INL postupně roste až do velikosti 0.5 LSB, kde nastává zlom, protože upravený kód dále nepokračuje z 5 na další v řadě, tj. na kód 6. Tato úprava okamžitě odstartuje skokovou změnu DNL z 0.1 LSB na – 1 LSB. INL pak zase v tomto konkrétním příkladu poskočí z původních 0.5 LSB na – 0.5 LSB. Jediným řešením, jak z této pasti ven, je již dříve zmíněné zvýšení rozlišení D/A převodníku.
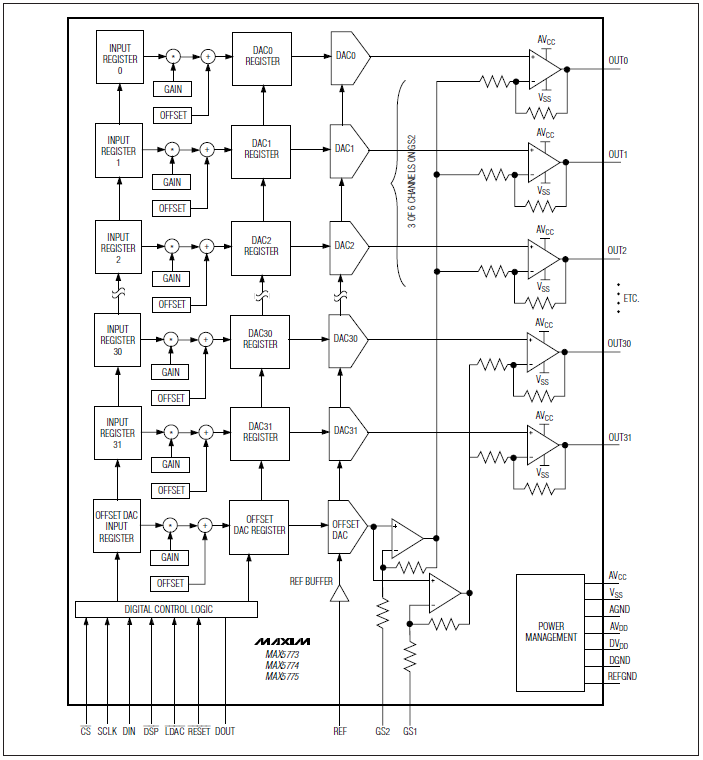
Blokový diagram 32kanálového D/A převodníku MAX5774; popis MAX5774 na stránkách výrobce naleznete zde.
Zmíněná digitální kalibrace chyby zesílení skutečně funguje a v Maximu tuto techniku s úspěchem využívají hned v několika obvodech, za které zmíníme např. MAX5774 – 32kanálový, 14bitový D/A převodník. Setkáváme se zde s násobičkou a také sčítačkou (adder – sčítačka, ale jindy také užovka, zmije nebo, jak jinak, kalkulačka) a proto lze účinně kalibrovat jak chybu zesílení tak i chybu offsetu.
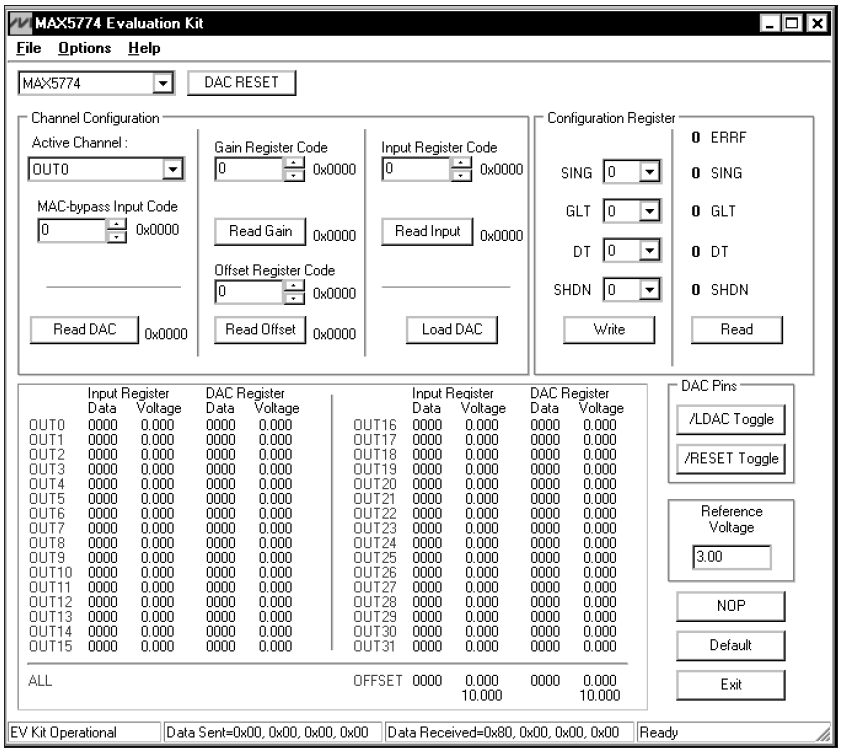
Ukázka uživatelského rozhraní v rámci vývojového kitu pro MAX5774
Hlavní výhodou, pro některé ale také nevýhodou, zmíněné digitální metody může být jednoduchost kalibrace s využitím ATE. Lookup tabulku nebo kalibrační koeficienty lze naprogramovat i manuálně, ale takový postup obvykle zabere určité množství času a praktická hodnota přitom nemusí být zase tak veliká.
Jak přinutit napěťovou referenci ke kalibraci chyby zesílení?
Další možností, kterak potlačit chybu zesílení (Gain Error), je nastavení napěťové reference. Tato metoda je obzvláště vhodná pro systémy, vyžadující vysokou přesnost, kterou ale nemusí doprovázet vysoké rozlišení.
Klíčem k celému řešení je využití trimovatelné reference, např. v podobě MAX6143. Obvod vykazuje výchozí přesnost 0.05 % spolu s teplotním koeficientem 3 ppm/°C v rámci teplotního rozsahu od -40 °C až do +125 °C. Jeho popis na stránkách výrobce naleznete zde. Další trimovatelné reference pak zachycuje přiložená tabulka.
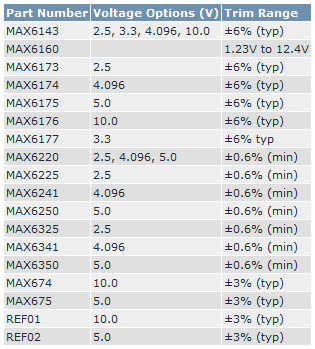
Trimovatelné napěťové reference v nabídce Maximu; otázce využití referencí se na serveru hw.cz dále věnujeme např. v Úvodu do světa napěťové reference.
Celé nastavení obvodu MAX6143 se jednoduše odehraje připojením potenciometru mezi výstup, zem a trimovací pin.
Typické zapojení zdroje referenčního napětí MAX6143
Výstupní trimované napětí obvodu MAX6143 definuje následující závislost:
![]()
kde
- Vout představuje výstupní napětí
- Vnom reprezentuje jmenovité výstupní napětí
- R zohledňuje poměr R1 / (R1 + R2) a
- k je pro MAX6143 typicky 0.06 (6 %).
V extrémních případech dostáváme R = 0 nebo R = 1.
- Pro R = 0 bude Vout = Vnom × 1.06.
- Pro R = 1 zase dostaneme Vout = Vnom × 0.946.
Trimujeme napěťovou referenci
Kalibraci zesílení lze vyřešit dvěma způsoby: Manuálním nebo ještě lépe digitálním potenciometrem, který v této věci nabídne nejjednodušší způsob automatického kalibrování. (Viz také článek Digitální potenciometr s přesností 1 % na hw.cz)
Zůstaneme – li poplatní polovodičovým strukturám Maximu, lze pro náš konkrétní případ doporučit např. 128pozicový digitální potenciometr s rozhraním SPI – MAX5436 (popis na stránkách výrobce naleznete zde).
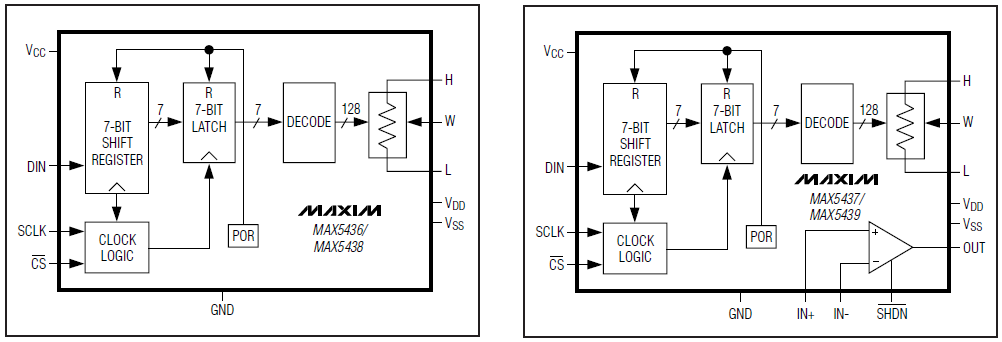
Vnitřní struktura digitálních potenciometrů MAX543x
Jednoduché připojení obvodu MAX5436 nevyžaduje další, vnější součástky a zajišťuje dostatečnou regulaci v rozmezí od -5.36 % až do +6 % s rozlišením od 0.08 % do 0.1 %, což pro většinu aplikací zcela vyhovuje.
Závěr:
Článek popisuje některé způsoby kompenzace chyby zesílení v systémech s datovými převodníky. Digitální kalibrace může být zajímavá, vnáší však přídavné nelinearity INL a DNL (např. ±1 LSB (DNL) v korekčních bodech). Řešením může být převodník s vyšším rozlišením nebo nastavení napěťové reference, třeba pomocí digitálního potenciometru, se kterým přídavné nelinearity typu DNL a INL řešit nemusíme.
 Použitá literatura:
Použitá literatura:
- [1] http://www.maxim-ic.com/appnotes.cfm/an_pk/4494
- [2] http://www.maxim-ic.com/quick_view2.cfm/qv_pk/4736
- [3] http://datasheets.maxim-ic.com/en/ds/MAX5774EVKIT.pdf
- [4] http://datasheets.maxim-ic.com/en/ds/MAX5436-MAX5439.pdf
Download a odkazy:
- Domovská stránka Maxim: http://www.maxim-ic.com/
- Distributor pro ČR: http://www.mespraha.cz/



