
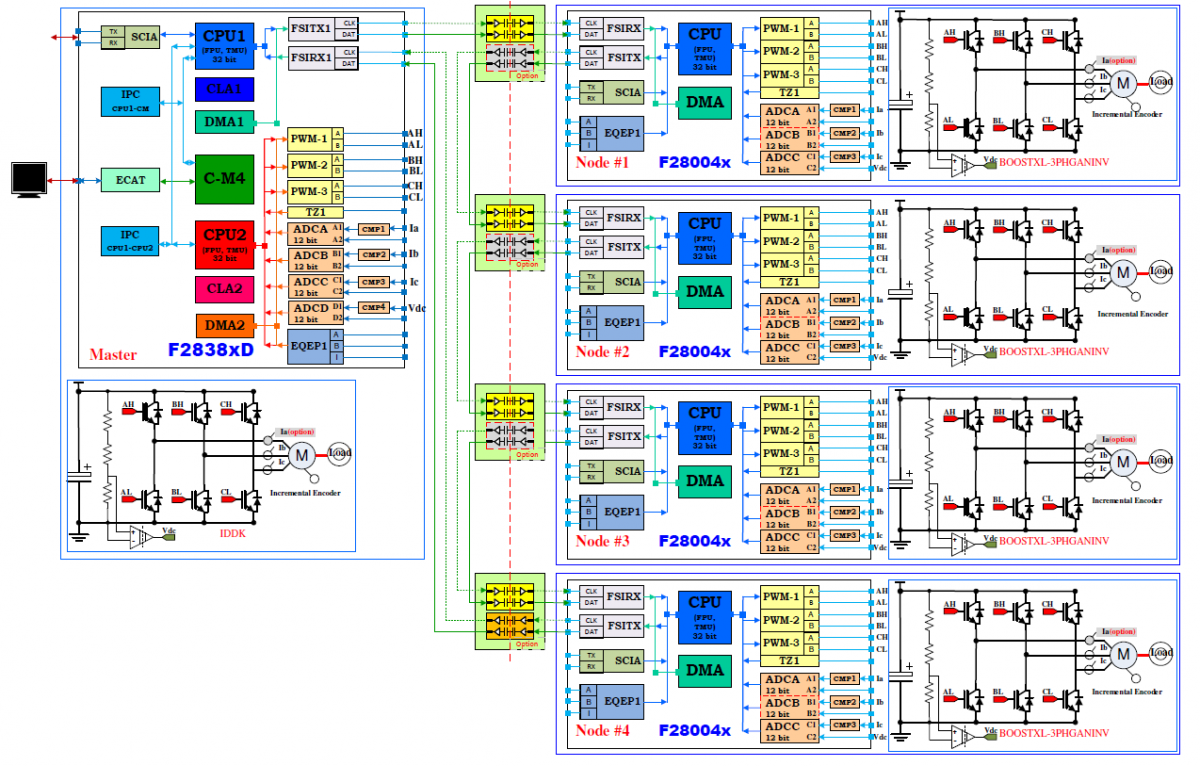
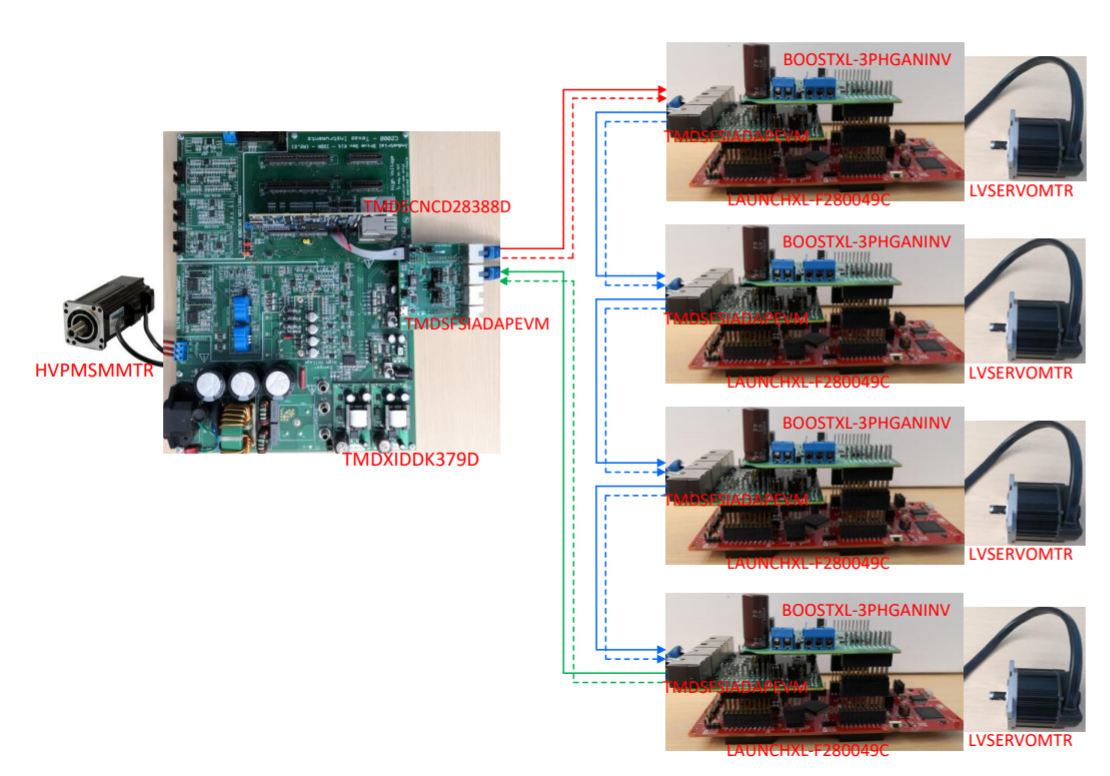
Referenční design představuje centralizovaný a distribuovaný víceosý servopohon, který je možno připojit k nadřazenému systému pomocí vysokorychlostního rozhraní EtherCAT. Víceosé servo pohony se používají v průmyslové automatizaci, zejména pro ovládání robotů. Rozhraní FSI se vyznačuje vysokou rychlostí, nízkou latencí a umí spojit více zařízení s mikrokontrolery řady C2000.
Každý motor, který je určen pro danou osu, je připojen k inteligentnímu driveru v podobě desky F28004x. Tento driver zajišťuje plynulý chod motoru v reálném čase. Řízení motorů se provádí pomocí desky F2838x, kde běží regulační smyčka pro všechny připojené drivery jednotlivých motorů. Deska F2838x je schopna řídit jeden motor přímo a pomocí sběrnice FSI dalších 16.
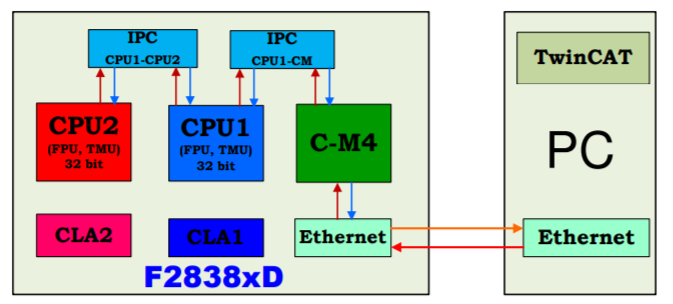
Na desce F2838x je procesor s více jádry, a díky tomu je schopna zajistit EtherCAT komunikaci s nadřazeným systémem. Pro jednoduchou implementaci a seznámení se s problematikou řízení motorů přes sběrnici FSI a EtherCAT slouží knihovna C2000WARE MotorControl SDK.
EtherCAT komunikace
Zařízení F2838x nabízí vylepšené možnosti připojení a zároveň zvyšuje výkon ovládání umožňující flexibilitu na úrovni systému v průmyslových aplikacích a sítích. Komunikace v reálném čase jsou umožněny díky speciálnímu managementu Connect Managerem (CM) založeném na Arm Cortex-M4, který zpracovává intenzivní komunikaci a optimalizuje připojení. Obrázek níže ukazuje EtherCAT slave na desce F2838x. Procesor na desce F2838x obsahuje dvě jádra C28x (CPU1, CPU2) a jedno jádro Cortex-M4. Periferie EtherCAT může být připojena k jádru CP1 nebo C-M4. V tomto případě je EtherCAT připojena k jádru C-M4, které zajišťuje plynulou komunikaci s vysokým výkonem a nízkou latencí.
Vlastnosti designu:
- Využití vysokorychlostního sériového rozhraní (FSI) pro komunikaci v reálném čase s více zařízeními (motory).
- Regulační smyčka polohy a rychlosti pro všechny připojení slave zařízení (motory) na hlavním uzlu založeném na F2838x.
- Nastavení krouticího momentu a proudu pro každé slave zařízení F28004x.
- S jednou F2838x lze spravovat až 16 os (motorů). Start a stop každé osy lze ovládat v jednom okamžiku.
- Dosahuje vyšší přesnosti řízení víceosého pohonného systému.
- K implementaci využívá vícejádrové funkce F2838x k ovládání rychlosti a polohy.
- Integrovaný nástroj SFRA na F28004x i F2838x pro online ladění.
Více informací na https://www.ti.com/tool/TIDM-02006



