
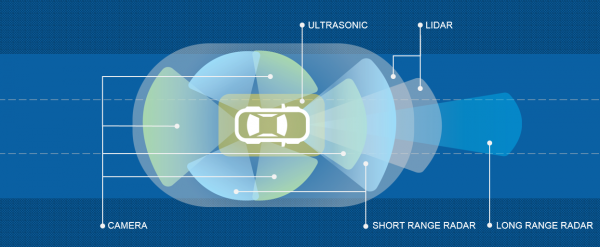
Autonomní systémy spoléhají zcela na signály ze senzorů, které dávají řídícím jednotkám představu o okolním světě. Pro komplexní obraz okolního světa je používána celá řada senzorů od laserových senzorů (LIDAR), přes kamerové systémy, po vysokofrekvenční radary s různým dosahem. Každý z těchto senzorů má svoje přednosti v určité oblasti detekce okolí. Například pomocí LIDARu jsme s dobrou přesností zachytit pohybující se objekty a pomocí obrazu z kamery rozpoznat o jaký objekt se jedná. Vysokofrekvenční radary jsou pak používány zejména pro detekci jiných vozidel v blízkém, či vzdáleněnějším okolí.
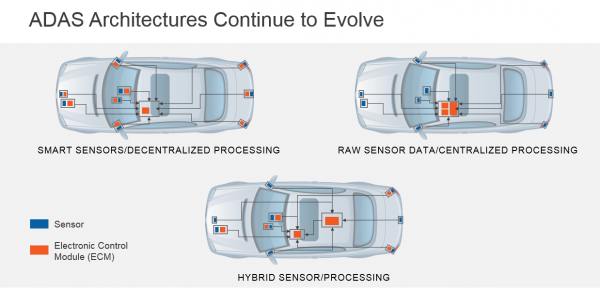
Funkce těchto senzorů se více či méně překrývá, ale dnes už je najdeme v téměř jakémkoliv moderním automobilu. Jelikož byly historicky různé asistenční systémy do vozidel přidávány postupně, přednost dostalo decentralizované zpracování signálu, kdy většina asistenčních systémů má svou řídicí jednotku, která vyhodnocuje informace a komunikuje s ostatními systémy. Výhoda tohoto přístupu je jednodušší testování, kdy je možné jednotlivé systémy testovat odděleně.
V souvislosti s autonomními systémy se však mluví spíše o centrálním zpracování dat, kdy jsou data z různých typů odesílána do centrální řídicí jednotky, která má dostatečný výkon na zpracování dat ze všech dostupných senzorů a rozhodování na základě získaných informací. Kompromisem je hybridní architektura, kdy jsou data předzpracovávána už samotným senzorem a poté odeslána centrální řídicí jednotce.
Jak centralizovaná, tak hybridní architektura přináší podstatně větší nároky na testování. Systémy už nelze testovat odděleně, ale je třeba provést integrace všech komponent. Tyto systémy musí procházet komplexními testy. Testování elektronických systémů v produkčních automobilech je definováno normou ISO 26262, která dále rozděluje systémy do několika kategorií ASIL (Automotive Safety Integrity Level) dle závažnosti důsledků v případě poruchy. Většina systémů ADAS spadá to kategorie ASIL D, což je kategorie s nejpřísnějšími požadavky. Dle této normy by spolehlivost systémů měla být testována zhruba na 140 milionů kilometrů, aby bylo možné prokázat, že jsou na stejné úrovni bezpečnosti jako řízení člověkem. V reálné testování v provozu by samozřejmě bylo téměř nemožné. Plně softwarové simulace zase většinou nejsou schopny zachytit okrajové jevy vznikající v reálném světě.
Jak tedy otestovat systémy na 140 milionů kilometrů?
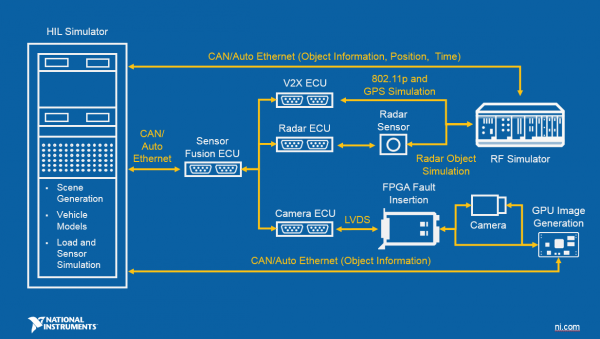
Tento problém dokáží řešit HIL (Hardware-In-the-Loop) systémy. Principem je propojení simulovaných komponent s reálnými. Simulace pak probíhá v reálném čase, což v praxi znamená, že jsme pro řídicí jednotku schopni simulovat chování motoru, bez toho aniž bychom měli jednotku připojenu fyzicky k motoru. Stejně tak v případě simulace ADAS systémů jsme schopni pro senzory typu radarů, kamer nebo LIDARů simulovat okolí a cíle. Výhodou platformy National Instruments pro HIL testování je její flexibilita. Pomocí této platformy jsem schopni vytvořit komplexní simulátor, který bude schopný provozovat některý z programů pro modelování jízdních situací (např. IPG CarMaker) a na základě jízdních situací generovat simulované signály, které jsou detekovány senzory automobilu. Výsledkem je pak kompletní test řídicí jednotky ADAS systémů, kdy jsem schopni testovat, jak se bude systém rozhodovat a chovat v reálném provozu.
Podívejme se blíže na test radarů. Tyto radary většinou fungují v pásmu milimetrových vln s nosnými frekvencemi okolo 24GHz a 73GHz. Principem testu je generování simulovaného cíle. Radar tedy vysílá signál, který je přijat testovacím systémem, down-konvertován do rozsahu přijímače, digitalizován a přiveden na hradlové pole, na kterém je podle požadovaných parametrů (počet cílu, velikost cíle, vzdálenost) vygenerován signál, který se radaru jeví jako odezva reálného cíle. Polohu/úhel cíle jsme schopni simulovat buď uložením na otočný přípravek, nebo robotické rameno. V závislosti na konfiguraci systému je možné generovat několik cílů z různých úhlů. Tuto technologii používá například vývojové centrum Audi. Na video prezentace systému od hlavního vývojáře Audi pro radarové systémy se můžete podívat zde:


Jak již bylo řečeno, ADAS systémy využívají sloučení informací z různých typů sensorů, proto musejí být různé komponenty HIL testovacího systému přesně synchronizovány. Pokud testujeme například kamery, můžeme simulovat obraz ze softwaru pro simulace jízdních situací na monitory, které jsou pak snímány kamerou. Tento systém má nevýhodu ve velikosti testovacího pracoviště a složitosti testu. Použití monitorů se da obejít tak, že jsme schopni opět pomocí HIL systému promítat do kamer pouze část výřezu obrazu, kterou kamera aktuálně vidí. Kamera se tedy může uzavřít do přípravku menší velikosti a není nutné mít velké pole monitorů promítajících simulovanou situaci. V některých případech je také možné kameru úplně vynechat a simulovat přímo na fyzické úrovni signál, který by poskytoval kamera v reálném provozu řídicí jednotce systému ADAS. V poslední době je populární sloučení kamery a radaru do jednoho komponentu, tzn. Racam. Pro testování těchto systémů je přesná synchronizace obrazových informací pro kameru a vysokofrekvenčního signálu pro radar kritická.
Platforma National Instruments pro HIL testování spolu s řešeními partnerských firem poskytuje flexibilní systém, který je schopný simulovat signály pro Radary, LIDARy, kamery, GNSS přijímače a další senzory, které jsou v systémech ADAS používány, nebo se v budoucnu používat budou. Více technických informací od inženýrů a partnerů National Instruments o konkrétních řešeních je možné získat na konferenci NI Automotive Forum 2017 v Praze 20.4.



