
- „Díky automatickému testovacímu systému pro sekundární radar, který jsme vytvořili s použitím modulárních přístrojů NI PXI a LabVIEW, dokázal náš zákazník zkrátit dobu potřebnou pro testování radaru o 90 % ve srovnání s předchozím přístupem založeným na manuálním připojování k laboratorním přístrojům. Náš zákazník také ušetřil 60 % nákladů ve srovnání s jinými automatickými testovacími systémy, založenými na tradičních přístrojích.“
Vishwanath Kalkur, Captronic Systems Pvt Ltd
Dnešní radary potřebují před tím, než budou v letectví nasazeny, důkladné testování. Vyvinuli jsme automatický testovací systém s využitím modulárních přístrojů NI PXI, který má usnadnit funkční testy radaru a testy fyz. parametrů přijímače (Rx) a vysílače (Tx), jako jsou šířka pásma Rx, citlivost Rx, výkon Tx a parametry Tx pulzů.
Funkční testy zahrnují simulátor cíle pro radar na frekvenci 1 090 MHz, detekci video signálu a zobrazovač radarových snímků s použitím umělého TTL video signálu a komunikace po síti LAN. Odpovídací pulzy v simulátorech jednoho či více cílů byly stacionární i s pohyblivou trajektorií.
Struktura systému
Vytvořili jsme systém skládající se ze šasi NI PXI-1042 s osmi pozicemi a z vestavného kontroléru NI PXI-8196. Radar jsme provozovali buď v režimu vysílání nebo příjmu, abychom otestovali funkce Rx i Tx. Externí signály pro anténu, představující její azimut či polohu severu (ACP), byly generovány a simulovány prostřednictvím desky s programovatelným hradlovým polem FPGA. Pulzy představující odpověď cíle byly generovány s pomocí vektorového signálového generátoru (VSG) NI PXI-5671 na frekvenci 1 090 MHz. Systém snímal demodulované video signály z přijímače prostřednictvím vektorového signálového analyzátoru (VSA) NI PXI-5661 a měřil výkon Tx signálu a parametry pulzů. Synt. video signál na úrovních TTL, generovaný jednotkou zpracovávající radarový signál, byl snímán s pomocí digitálního vstupu obvodu FPGA a následně byl použit pro převodník radarových signálů při zobrazení cíle v polárních souřadnicích spolu s informacemi o vzdálenosti a azimutu, info kódem, výškou a kódem země.
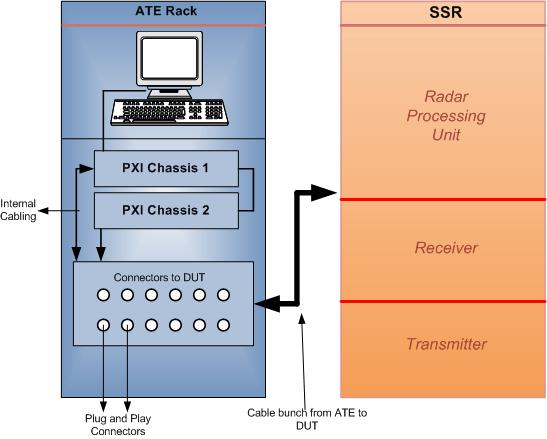
Obr. 1: Celková architektura systému pro automatické testování SSR
Každý spouštěcí i dotazovací pulz byl synchronizován s dotazovacím vf pulzem radaru SSR. Kvůli ochraně přístrojů jsme vypnuli vysílač radaru při testech Rx části, protože radar měl vestavěný modul TR. Tx i Rx porty sdílely jeden fyzický port, který byl připojen k anténě. Přístroje VSA i VSG byly připojeny k tomuto jednomu portu a nahradily tak anténu při sběru a generování vf signálů na frekvencích 1 090 MHz a 1 030 MHz.
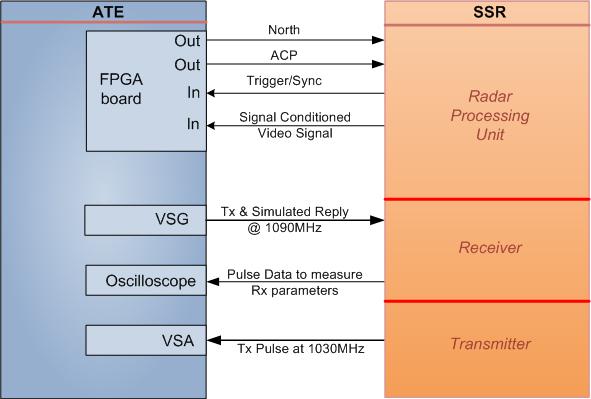
Obr. 2: Podrobný diagram automatického testeru a SSR
Měřené parametry
Tx parametry
Vysílací výstup radaru byl připojen k VSA z automatického testovacího systému prostřednictvím atenuátoru. Přenášen byl synchronizovaný sinusový pulz na vf frekvenci se šířkou přibližně 1 µs a dobou opakování pulzu (PRT) 5 ms.
-
 Stabilita vysílací frekvence (1 030 MHz + 0,03 MHz)
Stabilita vysílací frekvence (1 030 MHz + 0,03 MHz) - Špičkový výkon pulzu (2,0 kW)
- Perioda opakování pulzu (ms)
- Režim výstupního výkonu a stabilita PRF
- Výběr a sektorování výstupního výkonu
- Mezery mezi pulzy
- Střída (0,01 až 66 procent)
- Tvar pulzu
- Šířka pulzu (µs)
- Náběžná hrana pulzu (ns)
- Sestupná hrana (ns)
- Frekvenční spektrum
Rx parametry
Přijímaný signál v radaru pochází z vf pulzů generovaných s pomocí generátoru VSG, který byl synchronizován se spouštěcím / synchronizačním pulzem. Každý synchronizační pulz byl synchronizován s dotazovacím pulzem. Po přijetí synchronizačního pulzu na příslušném vstupu VSG a FPGA byl na VSG vygenerován vf pulzní výstup. Video signál z přijímače byl připojen k osciloskopické kartě, která měřila následující parametry:
- Citlivost přijímače
- Šířka pásma přijímače
- Dynamický rozsah přijímače
- Frekvenční stabilita přijímače
- Diferenciální měření fází
- Provozní citlivost přijímacího řetězce (STC)
- Potlačení postranních laloků přijímacího řetězce (RSLS)
Funkční testy
Při funkčním testu generoval systém simulované signály z antény, jako je pozice severu a ACP. Simuloval několik cílů na různých azimutech a v různých vzdálenostech se stacionárním pohybem i pohybem po trajektorii, a reprezentoval azimut a vzdálenost odpovídače v aplikaci provádějící konverzi radarového obrazu.
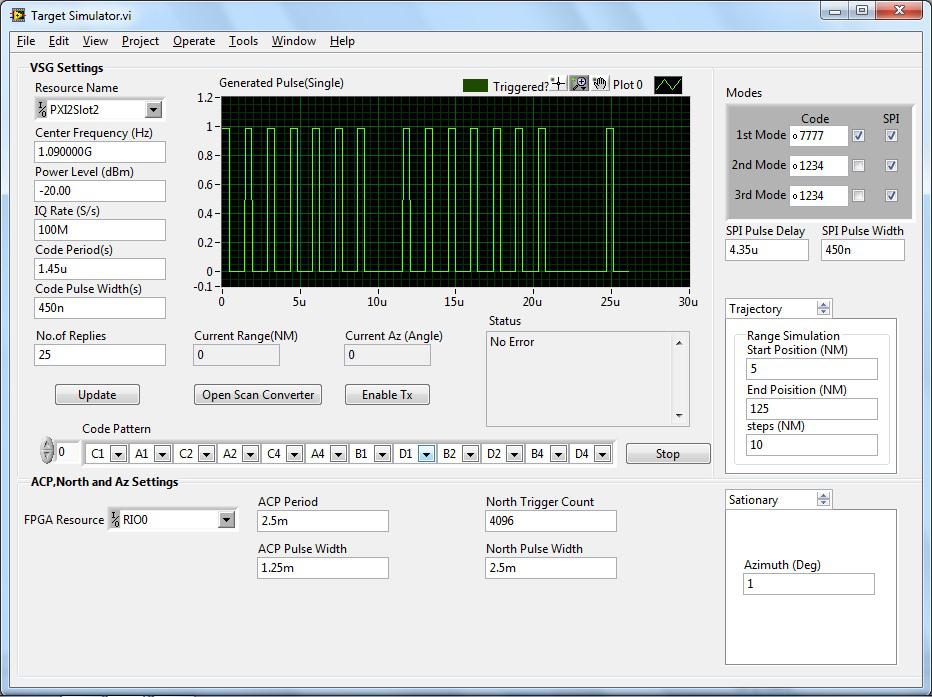
Obr. 3: Obrazovka softwaru pro simulaci cílů
Simulátor cíle
Správné funkční testy přijímače dokážeme provádět prostřednictvím simulace cílů za použití generátoru VSG a synchronizačních pulzů. Každý dotaz je synchronizován pomocí spouštěcího pulzu, připojeného ke spouštěcím vstupům VSG i FPGA. Uživatelé mohou nastavit, v jakém rozsahu chtějí simulovat azimut a vzdálenosti cílů. Když je cíl připraven pro simulaci, vygeneruje VSG vf pulzy s odpovědí v okamžiku, kdy ukazuje čítač azimutu v FPGA příslušnou hodnotu a když přijde následující spouštěcí pulz z radaru. Uživatel si může zvolit kód odpovědi a režim, následně jsou ze zadané vzdálenosti a azimutu generovány přednastavené pulzy. Cíle jsou simulovány se stacionárním pohybem i pohybem po trajektorii. Uživatel konfiguruje trajektorie pohybu. Systém dokáže simulovat více cílů s rozdílnými vzdálenostmi a azimuty s pomocí jediného generátoru VSG. Pulzy odpovědí mají různé šablony, podle specifikace uživatele. Pulzy odpovědí jsou sekvence pulzů s mezerou 1 µs a šířkou pulzu 450 ns. Každá odpověď cíle je rámována pulzy F1 a F2 na začátku a konci sekvence. Počet pulzů v rámci je odvozen od režimu dotazování, který lze nastavit v GUI. Každý synchronizační pulz může mít různý režim odpovědi, v závislosti na zvoleném dotazovacím režimu. Takové pulzy se třemi částmi představující odpověď lze konfigurovat samostatně a lze je generovat prostřednictvím VSG v návaznosti na každý synchronizační pulz.
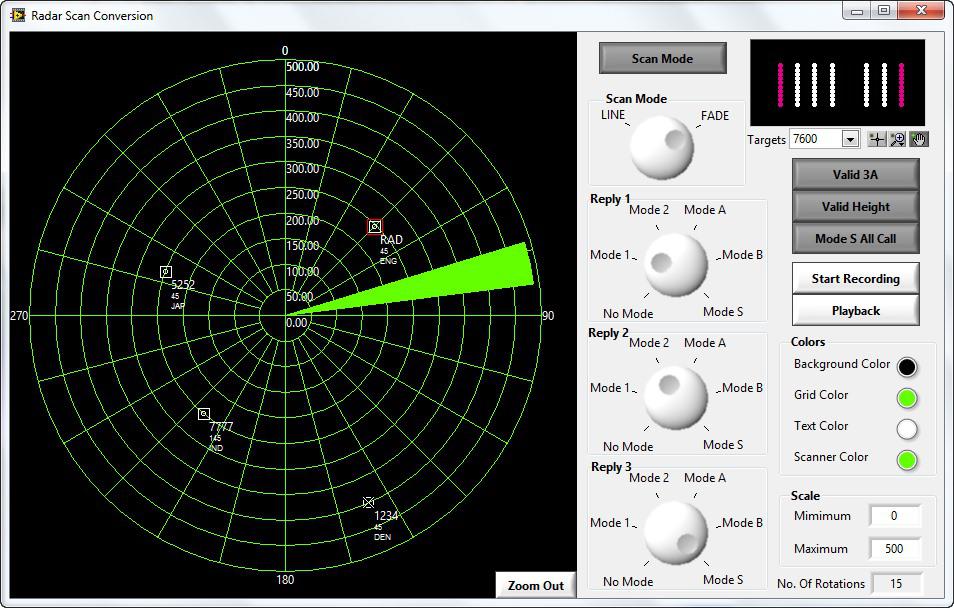
Obr. 4: Konvertor radarového obrazu
Konvertor radarového obrazu
Systém snímá a zpracovává video signály z radaru ve formátu TTL prostřednictvím desky s obvodem FPGA. Pulzy s odpovědí od cíle jsou demodulovány v přijímači radaru a v procesní jednotce radaru je zpracován surový video signál. Tento procesor vytváří TTL pulzy, které reprezentují rámec s odpovědí.
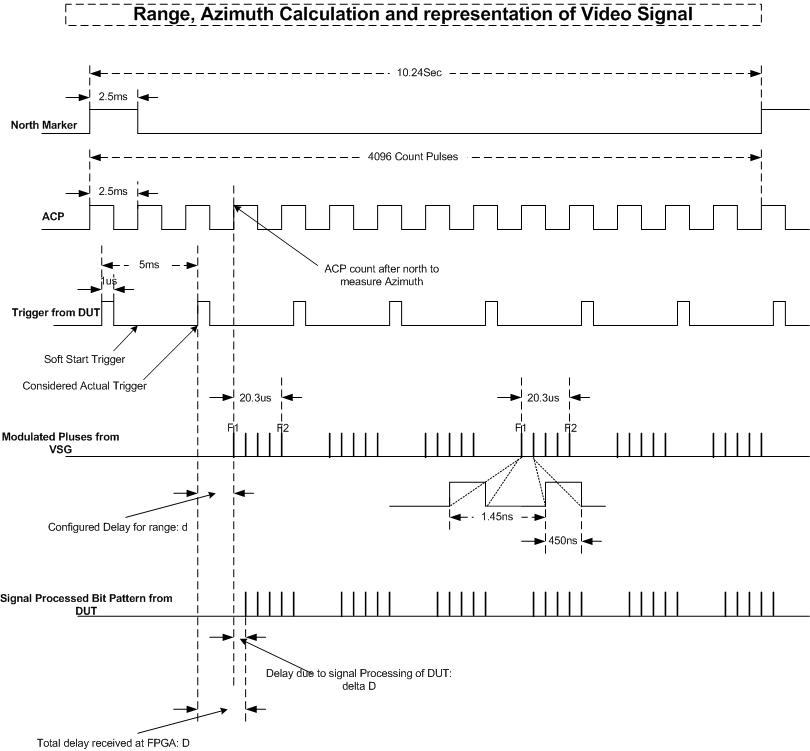
Obr. 5: Signály představující pozici severu, ACP a synchronizační pulz z testované jednotky, simulace rámce s odpovědí, umělý TTL video signál z radaru
Tento rámec je dekódován v FPGA s přesným měřením šířky jednotlivých pulzů. Protože přijímač přijímá také šum z antény, jsou generovány také pulzy reprezentující nechtěný šum. Vyvinuli jsme algoritmus pro odfiltrování těchto pulzů a dekódování vlastního rámce. Obvod FPGA potom vypočítá vzdálenost a azimut cíle, spolu s info kódem, výškou a kódem země cíle.
Systém může přijímat umělý TTL video signál v těchto formátech: skutečný cíl změřený anténou, simulovaný cíl generovaný interně radarem a cíl simulovaný prostřednictvím VSG v závislosti na dotazovacích pulzech.
Simulace antény
Generování pulzu označujícího sever a generování signálu ACP prostřednictvím obvodu FPGA představují simulaci antény. Vytvořili jsme uživatelsky konfigurovatelné grafické rozhraní v prostředí LabVIEW, ve kterém lze nastavit šířku pulzů, PRT a azimut za jednu otáčku pro simulaci parametrů antény.
Funkce softwaru
Vyvinuli jsme modulární sekvenci upravitelných testů, které umožňují otestovat celkovou funkcionalitu. Uživatel si pro testy jednotlivých parametrů může zvolit buď automatický nebo manuální režim. S diagnostickým panelem mohou uživatelé přistupovat k jednotlivým PXI přístrojům pro testy ve smyčce či self-testy.

Obr. 6: Sekvence testů
Zkrácení doby pro testování radaru na platformě NI
Díky automatickému testovacímu systému pro sekundární radar, který jsme vytvořili s použitím modulárních přístrojů NI PXI a LabVIEW, dokázal náš zákazník zkrátit dobu potřebnou pro testování radaru o 90 procent, ve srovnání s předchozím přístupem založeným na manuálním připojování k laboratorním přístrojům. Náš zákazník také ušetřil 60 procent nákladů ve srovnání s jinými automatickými testovacími systémy, které jsou založené na tradičních přístrojích. Kromě toho nový systém nahrazuje pulzní generátory a modulátor jediným přístrojem NI PXI VSG, který umožňuje kompletní funkční testy při simulaci cílů, snímání video signálu a detekci cílů, což z něj dělá testovací systém s uzavřenou smyčkou.
Máme v plánu systém aktualizovat tak, aby testoval všech šest redundantních portů radaru prostřednictvím automatického přepínání. Použijeme multiplexer NI PXI-2596 SP6T, abychom se vyhnuli dlouhým kabelům a spojům.
Informace o autorovi:
Vishwanath Kalkur
Captronic Systems Pvt Ltd
No 3,Victorian Meadows,Munekolalu Village,Airport Varthur Road,Marathahalli
Bangalore
India
Tel: +918040373923
vishwanath@captronicsystems.com



