
LiDAR-on-a-chip
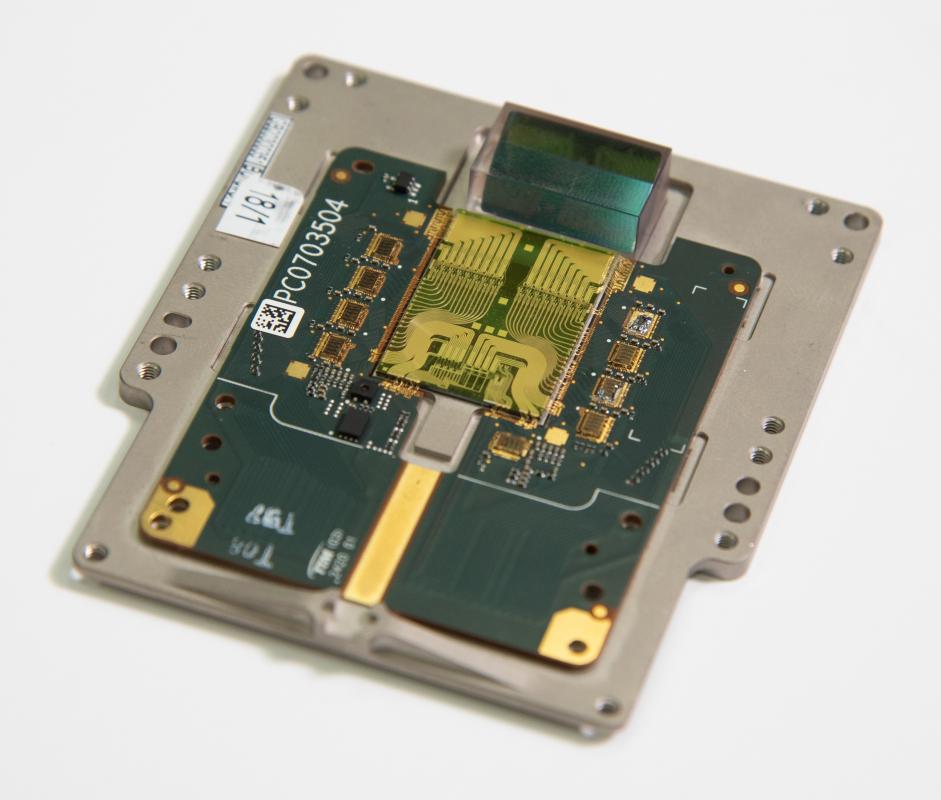 Systémy LiDARu (Light Direction And Ranging), na rozdíl od kamerových systémů, používají k detekci a určení polohy objektů vlastní zdroje světla - lasery. Prototyp Mobileye SoC LiDARu (LiDAR-on-Chip) tyto lasery integruje do samotného čipu pomocí procesu zvaného křemíková fotonika, který je schopný umístit aktivní a pasivní laserové prvky na křemíkový čip. A říkáme tomu fotonický integrovaný obvod (PIC). Tato technologie sama o sobě není novou metodou výroby čipů a společnost Intel ji již používá v transceiverech datových center. Nicméně pro potřeby senzoriky se využívá poprvé a systém LiDARu je pro ni přirozeně vhodný, protože se v první řadě spoléhá na lasery. Výhodou, kterou může křemíková fotonika přinést, je řešení jinak doposud značně velkého a objemného hardwaru LiDARu v malém provedení, které může nakonec vést k kompaktní velikosti zařízení v autě.
Systémy LiDARu (Light Direction And Ranging), na rozdíl od kamerových systémů, používají k detekci a určení polohy objektů vlastní zdroje světla - lasery. Prototyp Mobileye SoC LiDARu (LiDAR-on-Chip) tyto lasery integruje do samotného čipu pomocí procesu zvaného křemíková fotonika, který je schopný umístit aktivní a pasivní laserové prvky na křemíkový čip. A říkáme tomu fotonický integrovaný obvod (PIC). Tato technologie sama o sobě není novou metodou výroby čipů a společnost Intel ji již používá v transceiverech datových center. Nicméně pro potřeby senzoriky se využívá poprvé a systém LiDARu je pro ni přirozeně vhodný, protože se v první řadě spoléhá na lasery. Výhodou, kterou může křemíková fotonika přinést, je řešení jinak doposud značně velkého a objemného hardwaru LiDARu v malém provedení, které může nakonec vést k kompaktní velikosti zařízení v autě.
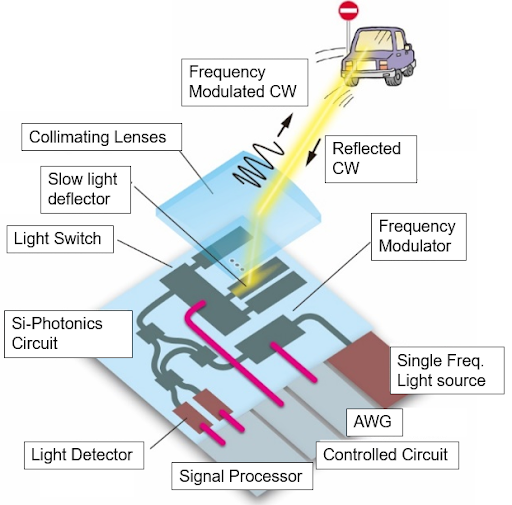 Standardní současné provedení LiDARu je totiž založené na rozmítání pulsujícího laserového paprsku rozmítaného do prostoru pomocí systému rotujících zrcadlech, která vyžaduje výrobu drahých komponent. Pokud lze vše integrovat do čipu v malém provedení, pak je možné vše vyrobit s nízkými náklady. Mobileye řešení totiž využívá místo běžného technologie měření doby letu vyslaných a od cílového objektu odražených diskrétních pulzů světla (technologie ToF), řešení Mobileye spoléhá na technologii frekvenčně modulované kontinuální vlny (FMCW), která umožňuje současně měřit vzdálenost i rychlost objektů, což jej činí efektivnější než systém měření doby letu.
Standardní současné provedení LiDARu je totiž založené na rozmítání pulsujícího laserového paprsku rozmítaného do prostoru pomocí systému rotujících zrcadlech, která vyžaduje výrobu drahých komponent. Pokud lze vše integrovat do čipu v malém provedení, pak je možné vše vyrobit s nízkými náklady. Mobileye řešení totiž využívá místo běžného technologie měření doby letu vyslaných a od cílového objektu odražených diskrétních pulzů světla (technologie ToF), řešení Mobileye spoléhá na technologii frekvenčně modulované kontinuální vlny (FMCW), která umožňuje současně měřit vzdálenost i rychlost objektů, což jej činí efektivnější než systém měření doby letu.
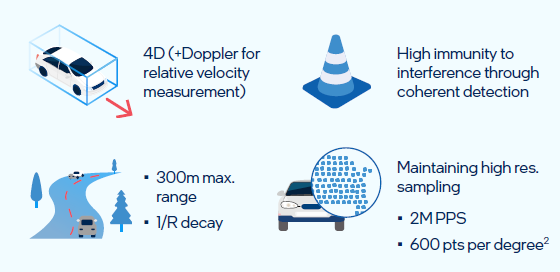
Jednoduše řečeno se využívá principu trvalého vysílání spojitého laserového paprsku světla, u něhož se vlivem odrazu od pohybujícího se předmětu vlivem dopplerova jevu mění frekvence, a tedy odražený přijatý paprsek světla má o něco odlišnou frekvenci než vyslaný. Změna frekvence zde odpovídá rychlosti objektu. Pokud je vysílaný paprsek frekvenčně modulovaný, tj. mění po určitou dobu na frekvenci nahoru a dolů modulačním signálem, frekvenční rozdíl mezi přijímaným a vysílaným signálem se zvyšuje se zpožděním, a tedy se vzdáleností. Jak jsou odrazy od cíle míchány s vysílaným signálem, vytvoří se rytmický signál, který po demodulaci poskytuje informaci o vzdálenosti. FMCW systém tak současně umožňuje měřit vzdálenost i rychlost pohybu detekovaných objektů.
 Tímto novým přístupem se společnost Mobileye snaží řešit výzvu v oblasti technologické i obchodní. Aby byly budoucí AV vozidla dostatečně levná a tedy ekonomicky dostupná, je nutné pro ně vyrábět i dostatečně levné komponenty, přičemž LiDAR doposud patří jednou z těch nejdražších, na rozdíl od již dostatečně levné technologie kamerových systémů. Nová technologie LiDARu by pak společně s kamerami mohla pro AV dosáhnou lepšího detekce a měření vzdálenosti, a aby bylo možné další zvyšování laťky bezpečnosti silničního provozu. Ta by v případě autonomních vozidle měla být alespoň on tři úrovně vyšší než běžný standard u lidských řidičů. Proto Mobileye a Intel zavádějí řešení, která inovativně poskytnou pro AV pokročilé funkce radaru / LiDARu a zároveň optimalizují výpočetní a nákladovou efektivitu. Jak uvedl pan Shashua, zobrazovací radarová technologie společnosti Mobileye s 184 vertikálními linkami posouvané optikou a s 2304 vyhodnocovacími frekvenčními kanály by měla umožnit radaru vytvořit dostatečně dobrý snímací stav pro autonomní řízení. Měla by poskytnout přesnější a detailnější obraz a měřící /detekční dosah až 200 metrů a dynamický rozsah 100 dB. Díky plně digitálnímu a nejmodernějšímu zpracování signálu, různým režimům skenování, bohatým nezpracovaným detekcím a sledování více snímků představuje softwarově definovaný zobrazovací radar společnosti Mobileye posun v architektuře umožňující výrazný skok ve výkonu.
Tímto novým přístupem se společnost Mobileye snaží řešit výzvu v oblasti technologické i obchodní. Aby byly budoucí AV vozidla dostatečně levná a tedy ekonomicky dostupná, je nutné pro ně vyrábět i dostatečně levné komponenty, přičemž LiDAR doposud patří jednou z těch nejdražších, na rozdíl od již dostatečně levné technologie kamerových systémů. Nová technologie LiDARu by pak společně s kamerami mohla pro AV dosáhnou lepšího detekce a měření vzdálenosti, a aby bylo možné další zvyšování laťky bezpečnosti silničního provozu. Ta by v případě autonomních vozidle měla být alespoň on tři úrovně vyšší než běžný standard u lidských řidičů. Proto Mobileye a Intel zavádějí řešení, která inovativně poskytnou pro AV pokročilé funkce radaru / LiDARu a zároveň optimalizují výpočetní a nákladovou efektivitu. Jak uvedl pan Shashua, zobrazovací radarová technologie společnosti Mobileye s 184 vertikálními linkami posouvané optikou a s 2304 vyhodnocovacími frekvenčními kanály by měla umožnit radaru vytvořit dostatečně dobrý snímací stav pro autonomní řízení. Měla by poskytnout přesnější a detailnější obraz a měřící /detekční dosah až 200 metrů a dynamický rozsah 100 dB. Díky plně digitálnímu a nejmodernějšímu zpracování signálu, různým režimům skenování, bohatým nezpracovaným detekcím a sledování více snímků představuje softwarově definovaný zobrazovací radar společnosti Mobileye posun v architektuře umožňující výrazný skok ve výkonu.
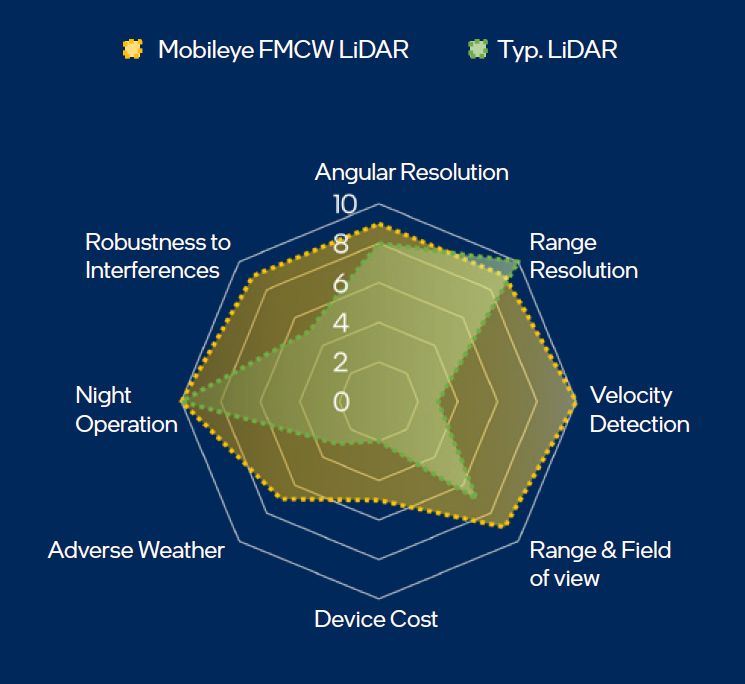
Navržený SoC LiDAR by měl poskytovat při manšách rozměrech a levnější výrobě i velmi kvalitní snímací parametry.
 Mobileye má v úmyslu nabídnout novou sadu výrobcům, kteří chtějí hotové ADAS (Advanced Driver Assistance Systems) řešení pro autonomní vozidla na úrovni 4 až 5. Společnost Mobileye není sama ve snaze zmenšit LiDAR co do velikosti i ceny. Například společnosti jako Aeva a Voyant Photonics již také vyvíjejí vlastní systémy. Nicméně Mobileye, resp. Intel, má výhodu v již výrobně zvládnuté technologii a existenci plně funkčního výrobního procesu.
Mobileye má v úmyslu nabídnout novou sadu výrobcům, kteří chtějí hotové ADAS (Advanced Driver Assistance Systems) řešení pro autonomní vozidla na úrovni 4 až 5. Společnost Mobileye není sama ve snaze zmenšit LiDAR co do velikosti i ceny. Například společnosti jako Aeva a Voyant Photonics již také vyvíjejí vlastní systémy. Nicméně Mobileye, resp. Intel, má výhodu v již výrobně zvládnuté technologii a existenci plně funkčního výrobního procesu.
Nová generace SoC LiDARu by se měla dostat do výroby do roku 2025 a očekává se, že náklady na každý SoC LiDAR budou v řádu stovek dolarů, tedy řádově levnější, než kolik stojí současné LiDAR systémy.
True Redundancy
K čemu však nový SoC LiDAR s vlastním vyhodnocením vizualizace je vlastně dobrý? Kamerový vizuální systém je a bude stále páteří autonomních vozidel (AV), ale přidáním subsystému v podobě LiDARu se zvýší funkční bezpečnost a výrazně zvýší tzv. MTBF hodnota, tedy střední doba mezi poruchami (Mean Time Between Failures). Mobileye tuto kombinaci označuje jako "True Redundancy" (skutečná redundance). Správná redundance senzorů zajišťuje, aby senzory sloužily jeden druhému jako záloha. Pokud však kamery a radar nebo LiDAR každý snímají jen určité prvky prostředí, které se pak společně kombinují a zpracovávají do jednoho modelu, tak to není pravý redundantní systém, protože výpadkem funkce jakéhokoliv senzoru nebo centrální řídící a vyhodnocovací jednotky dojde k nějakému výpadku / ztrátě informace.
Vyvíjený "True Redundancy" systém společnosti Mobileye funguje trošku jinak, totiž informace kamerový a LiDARový systém pracuje zcela na sobě nezávisle, samostatně každý vyhodnocuje svůj obraz a vytváří z něj úplný model okolí. Až následně se oba takto vzniklé vizualizace okolí automobilu porovnávají a potvrzují v obou modelech zachycená situace nebo vzájemně doplňuje v jednom obraze se nevyskytující či špatně patrná informace (např. objekt v okolí vozidla). Tato konfigurace systému má dvě hlavní výhody:
-
Množství dat vyhodnocující jednotkou a vytvoření vizualizace je výrazně nižší (jedna jednotka zpracovává jen obraz kamer a druhá jednotka jen data LiDAR a ne jedna jednotka všechny data společně).
-
V případě poruchy jednoho z nezávislých systémů může vozidlo pokračovat v provozu (v nějakém omezeném režimu), na rozdíl od vozidla s nízkou úrovní jištění systém, který musí okamžitě zastavit.
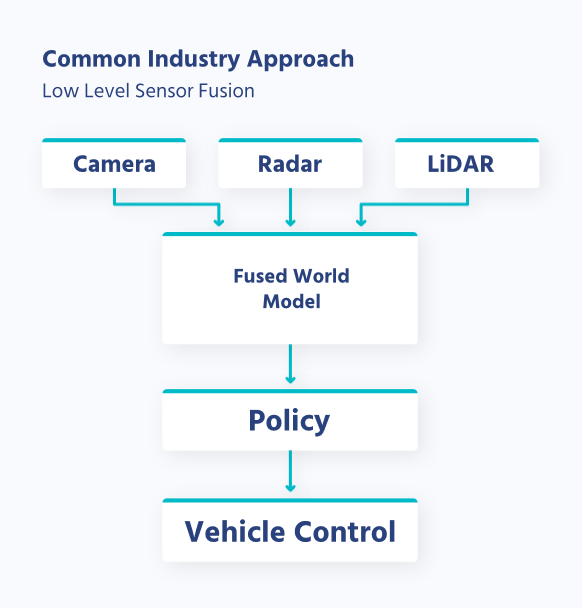
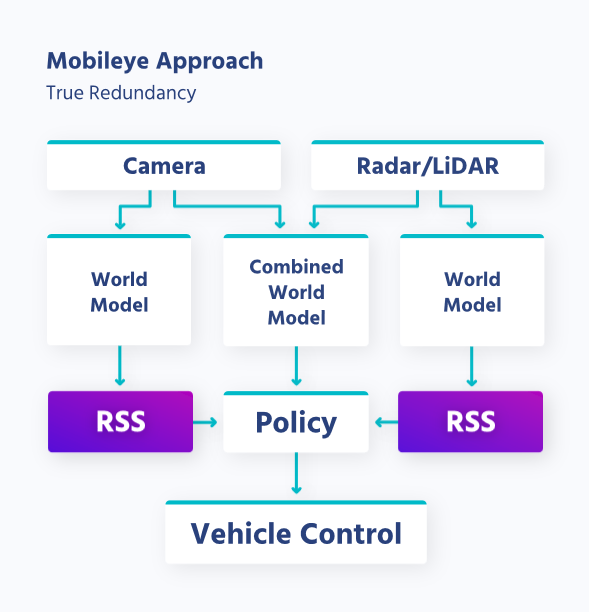
Porovnání blokových schémat jen částečně redundadního systému (obr. vlevo) a plně i výpočetně redundatního systému (obr. vpravo).
 Nový pohled na konstrukci radarů a LiDARů, speciálně navržené tak, aby vyhovovaly aplikacím s vlastním řízením, mají otevřít dveře přesnějším a levnějším způsobům, jak dosáhnout technologických cílů umožňujících realizaci bezpečných autonomních vozidel (AV), protože doposud tradiční radary a LiDAR mají svá omezení, pokud jde o modelování prostředí potřebné pro AV. Proč je to nutné? Hardware potřebný pro AV spotřebitele je na základě současných přístupů a dostupných senzorů neúnosný. Jednoduchá realita je, že radary jsou cca 10-krát levnější než LiDAR. Jsou tedy zapotřebí řešení, aby i LiDARy lepší a levnější.
Nový pohled na konstrukci radarů a LiDARů, speciálně navržené tak, aby vyhovovaly aplikacím s vlastním řízením, mají otevřít dveře přesnějším a levnějším způsobům, jak dosáhnout technologických cílů umožňujících realizaci bezpečných autonomních vozidel (AV), protože doposud tradiční radary a LiDAR mají svá omezení, pokud jde o modelování prostředí potřebné pro AV. Proč je to nutné? Hardware potřebný pro AV spotřebitele je na základě současných přístupů a dostupných senzorů neúnosný. Jednoduchá realita je, že radary jsou cca 10-krát levnější než LiDAR. Jsou tedy zapotřebí řešení, aby i LiDARy lepší a levnější.
K dosažení autonomie vozidel třídy L5 jsou podle společnosti Mobileye následující předpoklady:
-
Tři úrovně redundance v zorném poli směřujícím dopředu (FoV) a pro zbytek okolí vozidla pak 2 úrovně redundance.
- Dosáhnout nákladově efektivní skutečné redundance snímání prostoru okolo AV vozidle:
- → 360⁰ pokrytí kamerou
- → 360⁰ pokrytí radarem
- → 1x širokoúhlý LiDAR směřující dopředu
Odkazy:
- Webové stránky společnosti Intel Mobileye: https://www.mobileye.com/
- Webové stránky společnosti Intel o představení novinek Mobileye: https://newsroom.intel.com/news-releases/ces-2021-mobileye-avs-on-move/
- Webové stránky společnosti Intel Mobileye o technologii "True-Redundancy": https://www.mobileye.com/true-redundancy/
- Vyhlášení novinek Mobileye na veletrhu CES 2021: https://www.youtube.com/watch?v=B7YNj66GxRA&feature=youtu.be
- Článek "Mobileye Puts Lidar on a Chip—and Helps Map Intel's Future" na webu https://www.wired.com/story/mobileye-lidar-on-a-chip-intel/
- LiDAR výzkum na Nishiyama Laboratory Quantum Nanoelectronics Research Core, Tokyo Institute of Technology: http://www.opto.ee.e.titech.ac.jp/research/LiDAR-e.html



