Úvod:
Asynchrónny motor (ASM) je v súčasnosti najpoužívanejší pohonný stroj v priemysle. Stalo sa to hlavne kvôli jeho jednoduchej a robustnej konštrukcii a z toho vyplývajúcej spoľahlivosti. Ďalšími výhodnými vlastnosťami sú nízke náklady na údržbu, mechanická robustnosť a nízke výrobné náklady. V moderných regulovaných pohonoch sa používajú najčastejšie tieto metódy regulácie ASM:
- Skalárne riadenie vektorové
- Riadenie priame
- Momentové riadenie
Vektorové riadenie a priame momentové riadenie umožňujú oddelenú reguláciu magnetického toku a momentu. Ďalej sa bude článok zaoberať len priamym momentovým riadením.
Priame momentové riadenie:
Základné princípy:
Pri priamom momentovom riadení (Direct Torque Control - DTC) sa snažíme priblížiť riadeniu jednosmerného motora s cudzím budením, teda oddelene regulovať moment a magnetický tok stroja. Na rozdiel od vektorového riadenia, kde sa reguluje momentotvorná a tokotvorná zložka statorového prúdu, sa reguluje priamo moment a tok. Regulácia je vykonávaná pomocou hysteréznych regulátorov. Metóda DTC je orientovaná na statorový tok. Poznáme niekoľko metód DTC, ktoré sa navzájom odlišujú trajektóriou koncového bodu vektora statorového magnetického toku:
- Depenbrockova metóda – trajektória statorového magnetického toku je šesťuholníková.
- Takahashiho metóda – koncový bod priestorového vektora statorového magnetického toku sa pohybuje v medzikruží.
- Modifikácie Takahashiho metódy (napr.: Nová metóda).
Depenbrockova metóda bola vyvinutá pre trakčné aplikácie s ohľadom na minimálnu spínaciu frekvenciu striedača. Takahashiho metóda sa využíva hlavne v priemyselných pohonoch. Ako riadiaci algoritmus bola implementovaná Takahashiho metóda.
Takahashiho metóda:
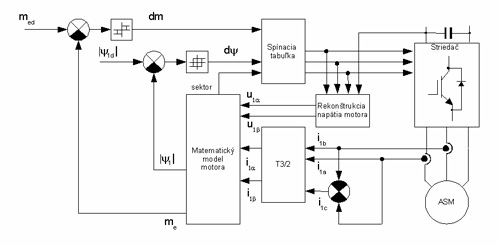
Predešlý obrázok znázorňuje blokovú schému Takahashiho metódy [1]. Hodnota momentu (me) a absolútna hodnota toku motora (|y1|) sú získané výpočtom v bloku Matematický model motora. Je možné použiť napäťový alebo prúdový model motora. V prípade prúdového modelu sú vstupnými veličinami statorové prúdy a uhlová rýchlosť rotora. Rozdiely žiadanej a skutočnej hodnoty príslušných veličín vstupujú do hysterézných regulátorov. Na základe výstupných hodnôt regulátorov je pomocou bloku Spínacia tabuľka vybraný priestorový vektor napätia, ktorý spôsobí potrebnú zmenu momentu a toku. Tento napäťový vektor je potom zopnutý v striedači.
Praktická realizácia:
Hardvér:
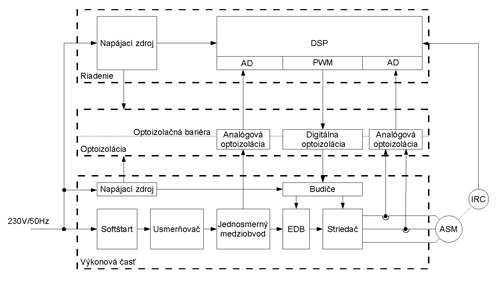
Prakticky je Takahashiho metóda realizovaná ako riadiaci algoritmus pre frekvenčný menič na obr. 2.
Základné parametre meniča:
- Vstupné napájacie napätie - 230 V / 50 Hz
- Záťaž - ASM do 1 kW
- Obmedzenie nabíjacieho prúdu medziobvodu pri štarte - Softštart
- Meranie otáčok / polohy - IRC
- Komunikácia s PC - USB
Hardvér je zložený z následujúcích častí:
- Výkonová časť - obsahuje softštartér (obmedzenie nabíjacieho prúdu medziobvodu pri zapnutí), usmerňovač, kondenzátory jednosmerného medziobvodu, EDB, striedač, budiče tranzistorov striedača a EDB a pomocný napájací zdroj.
- Optoizolácia - pozostáva z analógového a digitálneho galvanického oddelenia riadiacej a výkonovej časti.
- Riadenie – tvorí riadiaci DSP.
Softvér:
Pomocou frekvenčného meniča, sa realizuje regulácia na žiadanú rýchlosť. Riadiaci softvér je implementovaný na 16-bitový DSP firmy Freescale Semiconductor DSP56F803 [2], [3]. Tento DSP bol vyvinutý pre riadenie elektrických pohonov. Pri riadení sa využíva jeho bohatý prerušovací systém, prakticky celý program je rozdelený medzi obslužné rutiny príslušných prerušení. Samotný program vykonáva nasledujúce funkcie:
- Spracovanie údajov z AD prevodníka,
- Spracovanie signálov z IRC,
- Výpočet DTC algoritmu,
- Realizáciu otáčkovej slučky,
- Komunikáciu s PC.
Použitý DSP disponuje dvoma 4-kanálovými AD prevodníkmi s 12-bitovým rozlíšením. Aby bolo možné zmerať korektnú hodnotu prúdu, je potrebné vyhnúť sa meraniu počas otvárania alebo zatvárania sa tranzistora v príslušnej vetve striedača. Na tento účel sa využíva synchronizácia PWM a AD prevodníka. Pri každom začiatku PWM cyklu je generovaný impulz, ktorý spúšťa časovač. Časovač je nastavený tak, že v strede PWM cyklu vygeneruje impulz na odštartovanie AD prevodu. V strede PWM cyklu je už príslušný tranzistor naplno otvorený, takže je meraná korektná hodnota fázového prúdu.
Zvolený riadiaci procesor obsahuje potrebnú logiku na vyhodnotenie signálov z IRC. Počet impulzov a smer otáčania je preto možné dostať jednoducho prečítaním obsahu príslušných registrov. Na meranie rýchlosti pomocou IRC je možné použiť dve metódy:
- Meranie počtu impulzov v priebehu časového intervalu: táto metóda je vhodná pre IRC s veľkým počtom impulzov na otáčku alebo pre veľké rýchlosti.
- Meranie času medzi hranami signálu z IRC: táto metóda je vhodná aj pre malé rýchlosti.
Pretože je použitý IRC, ktorý má len 512 impulzov na otáčku, bola použitá metóda merania času medzi hranami signálu z IRC. Pri tejto metóde sa rýchlosť získa ako prevrátená hodnota nameraného času.
Výpočet DTC algoritmu sa vykonáva v obslužnej rutine prerušenia od AD prevodníka, ktoré je vyvolávané s frekvenciou 8 kHz. Vypočítaná spínacia kombinácia je potom pomocou PWM modulu zopnutá v striedači. Samotný PWM modul nie je pre DTC potrebný, používa sa len kvôli korektnému snímaniu prúdu, na synchronizáciu AD prevodníka. Spínacia kombinácia vstupujúca do PWM modulu vyvolá nastavenie striedy impulzu len 0 alebo 100%, podľa toho, či má byť príslušný tranzistor zopnutý alebo vypnutý.
Otáčková slučka s frekvenciou vzorkovania 1 kHz je tiež realizovaná v obslužnej rutine prerušenia od AD prevodníka. Na reguláciu otáčok je použitá kaskádna regulačná štruktúra s nadradenou otáčkovou a podradenou momentovou slučkou. Hodnoty žiadaného momentu sú získané z PI regulátora otáčok. Komunikácia s PC prebieha cez sériové rozhranie. Slúži na vizualizáciu meraných a vypočítavaných veličín a zadávanie žiadaných hodnôt pomocou programu Free Master.
Experiment:
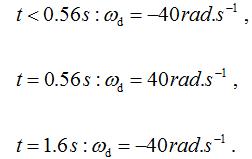
Experiment bol uskutočnený na frekvenčnom meniči znázornenom na obr.2 s programovým vybavením popísaným v predchádzajúcej časti (tok je estimovaný prúdovým modelom ASM). Ide o reverzáciu ASM naprázdno. Nezaťažený ASM reverzuje:
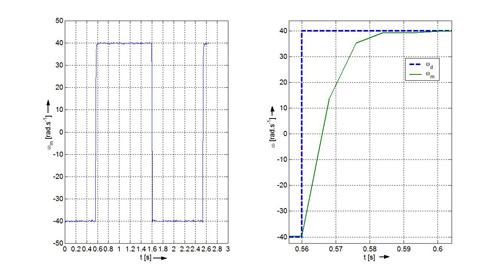
Obr. 3 Reálny systém (a) wm = f(t), (b) detail wm = f(t) - počas reverzácie
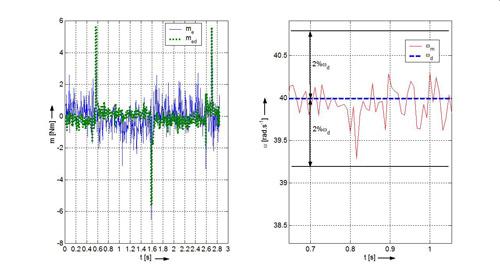
Obr. 4 Reálny systém (a) m = f(t), (b) detail w = f(t)
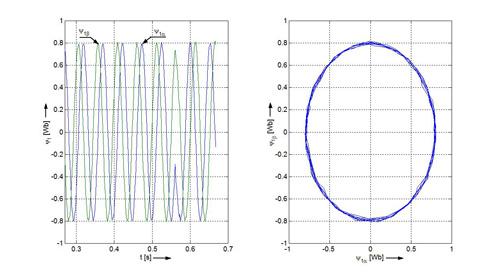
Obr. 5 Reálny systém (a) y1 = f(t) - počas reverzácie, (b) y1b = f(y1a)

Obr. 6 Reálny systém (a) i1 = f(t) - počas reverzácie, (b) i1b = f(i1a) - počas reverzácie
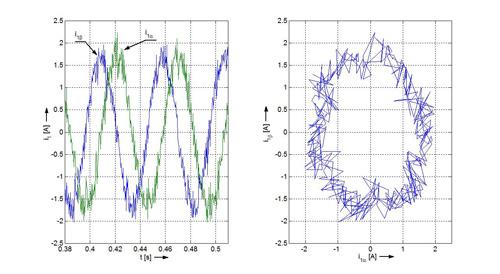
Obr. 7 Reálny systém (a) i1 = f(t) - detail, (b) i1b = f(i1a) - detail
Závěr:
V článku bola popísaná implementácia DTC na DSP firmy Freescale Semiconductor DSP56F803. Výsledky experimentu na reálnom systéme ukazujú dobrú dynamiku pohonu. Nábeh rýchlosti na žiadanú hodnotu počas reverzácie (obr. 3) je 40 ms. Nepriaznivý vplyv hysteréznej regulácie na zvlnenie rýchlosti a momentu je zrejmý z obr. 4. Zvlnenie rýchlosti je menej ako ± 2 % wd. Priebeh zložiek statorového toku v závislosti od času znázorňuje obr. 5(a) Približne kružnicová trajektória vektora magnetického toku je zrejmá z obr. 5(b).
Prekmit statorového prúdu počas reverzácie je uvedený na obr. 6. Detail zložiek statorového prúdu je znázornený na obr. 7. DTC je perspektívna metóda, ktorá sa vyznačuje dobrou dynamikou, čo potvrdzuje aj experiment na reálnom systéme.
Zvlnenie momentu a rýchlosti je možné zmierniť dostatočne malou šírkou hysterézneho pásma regulátora momentu, ale tu sú limitujúcimi faktormi výpočtový čas riadiaceho algoritmu (potrebný je rýchly DSP) a obmedzená frekvencia spínania výkonových polovodičových súčiastok. Z uvedeného vyplýva, že DTC nie je vhodné použiť v aplikáciách vyžadujúcich malé zvlnenie rýchlosti. Naopak, uplatnenie nájde tam, kde je potrebná rýchla zmena vyvíjaného momentu na hriadeli.
Použitá literatúra:
- Zeman, K. – Peroutka, Z. – Janda, M.: Automatická regulace pohonů s asynchronními motory. Západočeská univerzita v Plzni, 2004, ISBN 80-7043-350-7.
- DSP56F800 User’s manual, užívateľský manuál, Freescale Semiconductor.
- DSP56F803, katalógové listy, Freescale Semiconductor.



