
![]() Celá řada průmyslových aplikací v dnešní době vyžaduje použití výkonných, souběžně vzorkujících, vícekanálových A/D převodníků. Typickým příkladem se tak stává monitorování parametrů elektrického vedení (Obr. 1) nebo příbuzné řízení trojfázových motorů (Obr. 2). Zmíněné aplikace vyžadují přesná měření v širokém dynamickém rozsahu, který se v závislosti na daném řešení může pohybovat v rozmezí 70 až 90 dB, přičemž vzorkovací rychlost 16 ksps nebo ještě větší nebývá ničím neobvyklým.
Celá řada průmyslových aplikací v dnešní době vyžaduje použití výkonných, souběžně vzorkujících, vícekanálových A/D převodníků. Typickým příkladem se tak stává monitorování parametrů elektrického vedení (Obr. 1) nebo příbuzné řízení trojfázových motorů (Obr. 2). Zmíněné aplikace vyžadují přesná měření v širokém dynamickém rozsahu, který se v závislosti na daném řešení může pohybovat v rozmezí 70 až 90 dB, přičemž vzorkovací rychlost 16 ksps nebo ještě větší nebývá ničím neobvyklým.
Maxim pro tyto účely vymyslel a zhmotnil několik integrovaných obvodů, např. MAX1308, MAX1320 nebo MAX11046, které vhodně zapadají mezi DAS obvody pro systémy sběru dat (Data Acquisition System), protože v jednom pouzdře nabízejí celkem osm nezávislých, současně vzorkujících vstupních kanálů spolu s rychlými A/D převodníky s postupnou aproximací (successive-approximation ADC). Vše co se krásně třpytí však nemusí být čistým zlatem a proto musí návrháři věnovat pečlivou pozornost architektuře použitého systému, vhodnému výběru polovodičů s jejich okolní, pasivní RC drobotinou a v neposlední řadě také provedení a motivům na plošném spoji. V opačném případě se pravděpodobně rychle rozloučíme s definovanými parametry jednotlivých čipů a rozumným výkonem celého zařízení vůbec.
Architektura DAS (nejen) pro výkonové sítě

Obr. 1 - Typický způsob monitorování výkonové sítě
Každá výkonová fáze je na obr. 1 zastoupena jedním proudovým (CT) a také jedním napěťovým (PT) transformátorem. Celý systém se pak skládá ze čtyř takových párů, jednoho pro každou ze tří fází spolu se společným bodem, což vysvětluje běžně užívaný počet osmi vstupních kanálů dohlížecího systému. Zpracováním naměřených a následně převedených dat dostáváme tolik potřebné okamžité nebo průměrné, činné, jalové nebo zdánlivé výkony, účiníky apod.
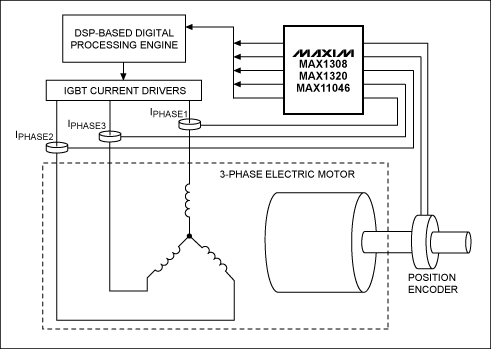
Obr. 2 - Jeden ze způsobů řízení 3f motoru
Každý převodník na obr. 2 souběžně vzorkuje svůj vstup, čímž vylučuje potřebu složitých DSP algoritmů, které by z postupně vzorkovaných dat vyrobily jakýsi souběžný obraz celé situace.
Hlavní zdroje rušení a příčiny interferencí, útočící na sběr dat
V systémech DAS rozlišujeme dva způsoby generující šumy, rušení a nepříjemné interference. V prvé řadě se bude jednat o samotnou, používanou elektroniku. Rušení včetně harmonického zkreslení produkuje již A/D převodník, vstupní zesilovače také zkreslují a ještě si k tomu šumí. Zdroje přesného referenčního napětí se zase nechávají poznamenat rušením a proměnlivou stabilitou k tomu. Na druhé straně zde máme nevlídné okolní prostředí s jeho nekompromisním elektromagnetickým zamořením, rušením ze zvlněných napájecích zdrojů, nechutné přeslechy mezi vstupně / výstupními piny (crosstalk - přeslech, viz také rychlý vtipný dialog nebo slovní ohňostroj, pozn. překl.) či pronikající interference a výrazné zarušení z digitálních sběrnic. Nejrůznější příčiny se pokouší mapovat obr. 3.

Obr. 3 - Blokový diagram typického dohledu nad výkonovým systémem s vyznačenými zdroji rušení a příčinami interferencí, ovlivňujícími rozlišení včetně celkové přesnosti
DAS začíná na vstupních, měřicích trafech proudu a napětí CT a PT, pokračuje nezbytným antialiasingovým, dolnopropustným LPF (lowpass filter) filtrem vhodně zvoleného řádu a vstupními zesilovači (buffer amplifier) až na samotné vstupy souběžně vzorkujícího A/D převodníku (ADC), který naměřenými daty zásobuje procesor (CPU). ADC tvoří jádro celé aplikace, protože měří jednotlivá napětí a proudy, které bývají transformovány v rámci běžného průmyslového rozsahu vstupů +5 V, ±5 V nebo ±10 V. Převodníky MAX130x, MAX132x a MAX1104x proto výše zmíněné, rozšířené rozsahy podporují a to bez potřeby dalších přídavných obvodů na svých vstupech. Velikost 1 LSB spolu s kvantizačním šumem (quantization noise) zmíněných součástek zobrazuje tab. 1, ze které jasně vyplývá celková velikost šumu včetně jiného rušení, přípustná pro konkrétní systém DAS s pevně definovaným bitovým rozlišením.

Tab. 1 - Přehled A/D převodníků, jejich rozlišení a kvantizační šum
Celkový šum včetně zvlnění na vstupech převodníku by neměl přesáhnout rozhodovací úroveň 0.5 LSB. Kvantizační šum pak bude podmiňovat konečné šumové pozadí systému.
V některých systémech postačuje „pouhý“ 1 mV RMS celkového šumu k tomu aby zcela zruinoval vysněnou přesnost, viz tab. 2.

Tab. 2 - Jak také dopadne rozlišení převodu, když neumravníme ruchy okolí
Vybíráme součástky
Vstupní zesilovač
Jak ukazuje obr. 4, převodníky MAX130x a MAX132x se vyznačují vstupy s relativně nízkou impedancí. Právě proto se ve většině 12 až 14bitových aplikací neobejdeme bez náležitého vstupního bufferu.

Obr. 4 - Zjednodušené zapojení vstupních obvodů MAX130x a MAX132x
Mezi hlavní požadavky, které se při výběru vstupního zesilovače pro 12 až 16bitové systémy nesluší obcházet, rozhodně patří
- Šířka pásma (bandwidth)
- Rychlost přeběhu (slew rate)
- Rozkmit výstupního napětí (Vp-p)
- Vlastní šum (noise)
- Zkreslení (distortion)
- Offset
Šum zesilovače je nutno držet na nejmenší možné úrovni, rozhodně velmi hluboko pod úrovní SNR příslušného převodníku. Obdobným způsobem pracujeme také s chybou v podobě offsetu včetně driftu v celém (!) teplotním rozsahu. I zde platí, že by zmíněné chyby rozhodně neměly dosahovat hranice požadované přesnosti systému, natož ji nelegálně překročit. Výběr vhodného bufferu rozhodně nelze odbýt.
Některé z doporučených, vysoce precizních operačních zesilovačů zachycuje tab. 3. Výrobci převodníků obecně ve svých datasheetech doporučují vhodné periferní obvody, které vybrali na základě mnohaletých zkušeností, perfektních znalostí fyziky, hlubokého, kolektivního rozjímání a následného pečlivého měření.

Tab. 3 - Doporučené precizní operační zesilovače pro různá rozlišení ADC
Celá řada populárních operačních zesilovačů se pro přesná měření nedoporučuje, příp. jsou pro ně zcela nevhodná, viz tab. 4.

Tab. 4 - Populární, obecné „operáky“ nemusí pokaždé vyhovět přísným požadavkům, kladeným na přesný sběr dat.
Požadavky na vstupní filtr pro MAX11046
Rodina převodníků MAX11046 je na svém vstupu tvořena strukturou, která nemusí vyžadovat vstupní buffer, viz obr. 5. Vstupní impedanci Zin pak zajišťuje vstupní kapacita v součinnosti se vzorkovací frekvencí a to následujícím způsobem:
Zin = 1 / (Cin x Fsample)
kde Fsample zohledňuje vzorkovací kmitočet a Cin = 15 pF. Jakmile se začne frekvence vzorků snižovat, vstupní impedance poroste, třeba takto:
- 266 kΩ pro 250 ksps
- 2.66 MΩ pro 25 ksps

Obr. 5 - Zjednodušené vstupní schéma MAX11046
Vysoká vstupní impedance MAX11046 dovoluje přímé propojení s nízkoimpedančními senzory, jakými třeba mohou se svými řády 10 až 50 Ω být měřicí transformátory napětí nebo proudu. Jediné co tak zbývá je zajistit vhodný, byť jednoduchý dolnopropustný filtr. Tab. 5 nabízí vhodné velikosti vstupního odporu Rsource pro různé měřicí aplikace v prostředí výkonových sítí nebo řízení motorů.
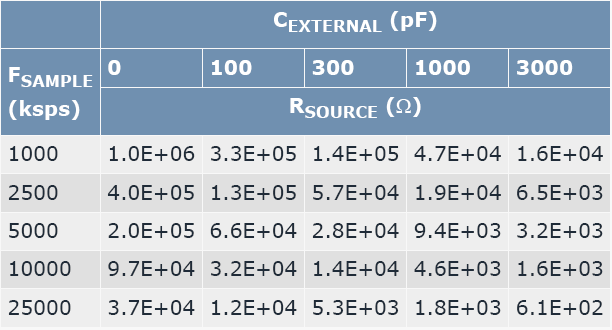
Tab. 5 - Volba Rsource na základě hodnot Cexternal a vzorkovací rychlosti
Správná volba RC sítě je nezbytná pro udržení přesnosti celého systému. Rezistory by měly být s kovovou vrstvičkou (metal film), přesností minimálně 1 % a nízkým teplotním koeficientem. Vyplatí se používat produkty hodnověrných výrobců, jako jsou
- Panasonic
- ROHM
- Vishay
Na místě kapacitorů použijte keramické kondenzátory s dielektrikem COG (NPO). Takové kondenzátory drží svou nominální hodnotu v celém širokém teplotním nebo také napěťovém rozsahu. Společnosti jako
- Kemet
- AVX
- Samsung
nabízí široký výběr relativně levných kapacit i pro povrchovou montáž. Osobně se mi osvědčil postup, při kterém se nakoupí několik vhodně zvolených velikostí jakostních SMD kapacit přímo na kotouči. Z nich pak vyskládám sérioparalelní kombinací vše potřebné. Obdobně postupuji v případě rezistorů, které lze navíc velmi jednoduše (nechat) laserově dotrimovat, viz praktický článek věnovaný návrhu kmitočtových filtrů. Pokud potřebuji „zcela“ přesné kapacity a nechci za ně utrácet obrovské částky, provádím měření a selektivní výběr přímo z kotouče. Je to někdy otrocká práce, ale výsledky rozhodně stojí za to.
A co s referencí?
Požadované rozlišení ADC včetně jeho přesnosti úzce, ne-li přímo kriticky souvisí s použitou referencí. Jak již naznačila tab. 1 výše, nezbývá než si ohlídat zejména počáteční přesnost včetně následného ujíždění v rámci celého teplotního rozsahu. Malý příklad:
Uvažujme převodník MAX11046 s 1 LSB o velikosti 62.5 μV. Vestavěná reference vykazuje poměrně solidní „úlet“ o velikosti ±10 ppm/°C. Na 50 stupních však napětí popojede již o ±500 ppm nebo chcete – li o ±2.048 mV, což tvoří úctyhodných ±33 LSB!
V takovém případě může být vhodnější použít externí zdroj referenčního napětí s malým driftem, např. MAX6341 (1 ppm/°C). Takové napětí pak s 50 stupni urazí pouze 0.2 mV nebo ±3 LSB. Počáteční přesnost MAX6341 (4.096 ± 0.001) je také výrazně lepší než v případě MAX11046 (4.096 ± 0.0016), což pomáhá vylepšit celkovou přesnost systému včetně teplotní stability.
Vstupní proud referenčního vstupu převodníku MAX11046 v módu vnější reference (external-reference mode) činí pouhých ±10 μA. MAX6341 naproti tomu se svým výstupním proudem do 10 mA může být použit jako jediný přesný zdroj hned pro několik převodníků, čímž lze vhodně vyřešit problém dílčích, zcela různých, počátečních i provozních změn referenčních napětí jednotlivých samostatných kanálů. Nikde totiž není stanoveno, jakým způsobem bude ke kolísání docházet. Tuto volbu si řeší každý čip v rámci výrobcem stanovených mantinelů a pravomocí sám za sebe. A pokud to přežene, dřív či později stejně spočine v tranzistorovém ráji a možná sebou vezme i někoho dalšího.
Závěr:
Navrhnout přesný systém nemusí být obtížné, pokud dodržíme základní, mnohdy však těžce nekompromisní požadavky. Výše zmíněné postupy budou zcela pochopitelně platit i obecně, v rámci každého měření, nejen toho trojfázového. Zbývá tedy ještě pečlivě navrhnout plošný spoj, kterému se budeme věnovat v dalším pokračování.
Použitá literatura:
Download a odkazy:
- Domovská stránka Maxim: http://www.maxim-ic.com/
- Distributor pro ČR: http://www.mespraha.cz/
- Bleskový návrh kmitočtových filtrů (hw.cz)



