
Úvod
Ultrazvukové zobrazování je významná lékařská vyšetřovací metoda, která se vyznačuje zejména bezpečností, efektivními náklady a zpracováním v reálném čase. Tradiční ultrazvukové zobrazovací systémy pracují na frekvencích od 2 do 15 MHz při milimetrové úrovni rozlišení. Často se používají při sledování nenarozeného plodu nebo diagnostice onemocnění vnitřních orgánů, kterými jsou např. srdce, játra, žlučník, slezina, slinivka, ledviny nebo močový měchýř. V posledních dvaceti letech dominovaly ultrazvukovým aplikacím tradiční stacionární, tj. nepřenosné systémy. Důvodem bylo zejména velké množství kanálů, umocněné náročným zpracování ultrazvukového signálu. Stárnoucí populace, rostoucí náklady na lékařskou péči a rovněž vyšší poptávka rozvíjejících se ekonomik však vedly k rychle rostoucí potřebě nových přístupů a řešení.

Moderní polovodičové technologie, dosahující vyššího výkonu za „méně peněz“, jako např. běžně používané digitální signálové procesory (DSP), znamenaly výrazný posun i u lékařských zobrazovacích zařízení. Zmíněné technologie také přispěly k miniaturizaci ultrazvukových systémů, přičemž zmenšení rozměrů nemělo za následek automatické snížení výkonu. Dnešní miniaturní ultrazvukové systémy mohou dosahovat stejných technických parametrů jako tradiční stacionární přístroje a to i navzdory tomu, že budou přenosné. Nabízí totiž takovou kvalitu zobrazení, aby lékaři mohli přesně a včas určit diagnózu. Přenosné systémy proto hrají stále větší roli v okamžité poúrazové nebo pohotovostní diagnostice a léčbě. Protože však na trhu přenosných ultrazvukových zařízení působí stále více firem, uspějí jen ti, kteří dokážou své výrobky vyvíjet a uvádět nejrychleji. Nezbytné, vstupní analogové struktury (Analog Front End, AFE), stejně jako signálové procesory DSP s kompaktními rozměry a vysokými výkony, jsou poptávány všemi výrobci ultrazvukových aplikací. Ještě důležitější je ale skutečnost, že výrobci požadují taková řešení, která lze pro efektivní zkrácení doby vývoje a bleskové uvedení na trh univerzálně sdílet v různých systémech.
Struktura ultrazvukových systémů
Ultrazvukové systémy rozlišujeme dle dostupných funkcí a také technických parametrů. Tak například, 3D, 4D a harmonické zobrazovací módy většinou nalezneme až v systémech vyšší kategorie, zatímco lacinější, low – endové struktury musí vystačit s dvourozměrným zobrazováním v B-módu či spektrálním Dopplerem. Odlišné funkce obvykle určuje digitální výbava systému (back – end). Ultrazvukové systémy vyšší, high – endové kategorie proto zcela logicky požadují pro své DSP, zpracovávající signál prakticky v reálném čase, větší výpočetní výkony. Sdílené zpracování signálu mezi systémy různých kategorií je poměrně obtížné, nicméně ultrazvuková zařízení obvykle vystačí se srovnatelnou architekturou vstupních kanálů, bez ohledu na různé výkonnostní požadavky.
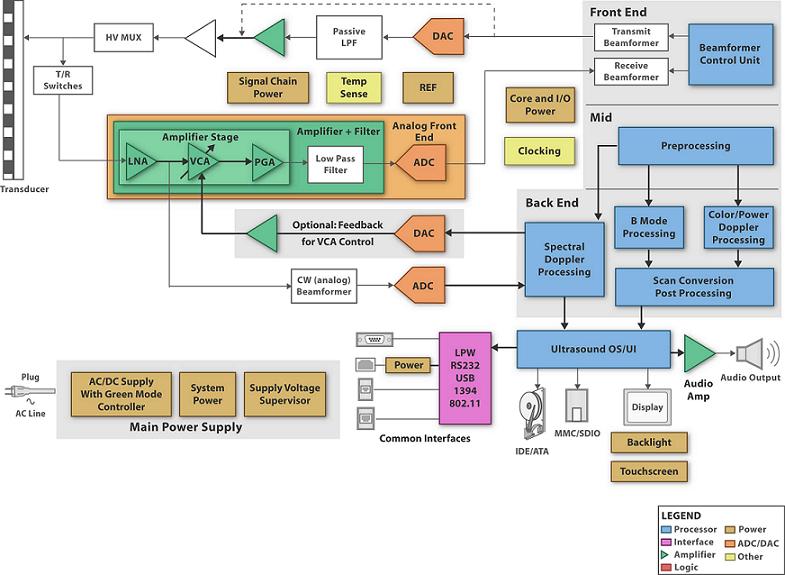
Blokové schéma ultrazvukového systému (kliknutím zobrazíte plný náhled)
Jak ostatně můžeme vidět i na obrázku, vstupní analogová struktura AFE ultrazvukového systému se skládá ze standardních bloků, kterými jsou
- nízkošumový zesilovač (low-noise amplifier; LNA),
- TGC zesilovač (time-gain controlled amplifier; TGC),
- napěťově řízený zesilovač (voltage-controlled amplifier; VCA),
- zesilovač s nastavitelným ziskem (programmable gain amplifier; PGA),
- dolní propust (low-pass filter) a
- analogově / digitální převodník (analog-to-digital converter; ADC).
Technické parametry analogové front – end struktury zásadně ovlivňují výkon celého systému. Návrh AFE se proto vyplatí standardizovat pro opětovné použití v různých systémech a to do té míry, jak jen to dosahované technické parametry pinově kompatibilních pouzder dovolují. Této standardizace lze jednoduše dosáhnout zejména v systémech střední a nižší kategorie, které nevyžadují žádné speciální úpravy analogových signálů.
Bohužel, většina standardních AFE struktur takové potřeby nesplňuje a tudíž se musí používat samostatné čipy, které již nabídnou požadované technické parametry jak pro stacionární tak i přenosné systémy. Stacionární systémy mohou například tolerovat vyšší spotřebu energie, ale nesmí zase tolik „šumět“, zatímco u přenosných systémů to platí opačně, čímž se změna návrhu stává nevyhnutelnou.
Na trhu jsou však i nové AFE struktury, jako např. rodina AFE58xx od společnosti Texas Instruments, které výrobcům ultrazvukových systémů umožňují svůj návrh jednoduše standardizovat. Tyto obvody s jednotným pinoutem jsou určeny jak pro přenosné tak i stacionární systémy. Pinová kompatibilita pak pro výrobce znamená, že mohou navrhovat nové produkty a přitom, vedle rychlejšího uvedení na trh, dosahovat i nižších nákladů.
Vlastnosti AFE struktur a technické parametry systému
 Vývoj ultrazvukových systémů je komplexní činnost, kde každá vlastnost AFE může ovlivnit technické parametry celého zařízení. Důležitá je proto schopnost sladit různé parametry pro různé systémy.
Vývoj ultrazvukových systémů je komplexní činnost, kde každá vlastnost AFE může ovlivnit technické parametry celého zařízení. Důležitá je proto schopnost sladit různé parametry pro různé systémy.
Pro přenosné ultrazvukové aplikace je klíčovou podmínkou nízká spotřeba energie, která vzhledem k omezeným možnostem bateriového napájení znamená delší provozuschopnost. Takovou úvahou však můžeme negativně ovlivnit další parametry, jako např. rozsah vstupního signálu, vstupní šum, harmonické zkreslení a další. Obvykle jsou však u přenosných systémů a zařízení nižší kategorie takové „poklesky“ ještě přijatelné.
Dalším důležitým parametrem, hned za spotřebou energie, rozumíme šum AFE. Amplitudy vstupních signálů z ultrazvukových snímačů se pohybují v rozmezí od 10 μVpp až do 1 Vpp [1]. Čím nižší signál lze ještě detekovat, tím větší bude citlivost systému. Šum vstupního proudu i vstupního napětí zcela logicky ovlivňuje citlivost systému. Velikost šumu se u zařízení vyšší i nižší kategorie pohybuje v rozmezí od 0.7 nV/rt(Hz) až do 1.5 nV/rt(Hz) (RTI). Tyto hodnoty jsou pro generování kvalitních obrazů v reálném prostředí dostatečné. Lze samozřejmě použít i nízkošumový zesilovač, ale u výsledného ultrazvukového obrazu to nepovede k výraznému zlepšení, zejména vzhledem k šumu vstupního proudu a také zarušení T/R switchů (transmit / receive, viz také článek T/R switch pro ultrazvukové systémy na hw.cz). Kromě šumu vstupního napětí je pro zobrazovací aplikace rovněž důležitý blikavý šum (tj. šum 1/f). V módu netlumené vlny (Continuous Wave; CW) se nízkofrekvenční spektrum šumu posouvá k nosnému kmitočtu a snižuje na požadované frekvenci odstup užitečného signálu od šumu (signal-to-noise ratio; SNR). V širokém kmitočtovém rozsahu proto upřednostníme zesilovač s „plochou“ šumovou charakteristikou.
Řízení zesílení i jeho rozsah hraje v ultrazvukových aplikacích důležitou roli při zajišťování dynamického rozsahu obrazu. Má – li VCA zesilovač větší rozsah zesílení, nabídnou výsledné obrazy širší dynamické rozpětí a tím i lepší kvalitu. Dynamický rozsah systému lze určit na základě znalosti odstupu SNR u A/D převodníku:
Dynamický rozsah = SNR + rozsah říditelného zesílení (rovnice 1)
Tak například,
- 12bitový systém s
- odstupem signálu od šumu o velikosti 70 dB a
- VCA zesilovačem se 40 dB rozsahem definovatelného zesílení
může dosáhnout 110 dB dynamického rozsahu.
Jinými slovy, dynamický rozsah 105 dB lze také definovat vynásobením
10 x 2 x 0.7 x 7.5 [dB],
přičemž uvažujeme
- činitel tlumení v lidském těle o velikosti 0.7 dB/cmMHz,
- hloubku zobrazení 10 cm a
- 7.5 MHz snímač.
![]() V současných ultrazvukových systémech se pro zobrazování malých detailů běžně používají 10 až 15 MHz sondy a proto je často potřebná dynamická škála nad 100 dB. Z pohledu systémového návrhu se proto upřednostňuje AFE struktura s větším rozsahem zesílení. AFE s vyšším celkovým ziskem je navíc výhodná pro detekci slabých signálů a také kompenzaci průchozích ztrát v příbuzných obvodech (např. průchozí ztráta pasivního filtru vyššího řádu).
V současných ultrazvukových systémech se pro zobrazování malých detailů běžně používají 10 až 15 MHz sondy a proto je často potřebná dynamická škála nad 100 dB. Z pohledu systémového návrhu se proto upřednostňuje AFE struktura s větším rozsahem zesílení. AFE s vyšším celkovým ziskem je navíc výhodná pro detekci slabých signálů a také kompenzaci průchozích ztrát v příbuzných obvodech (např. průchozí ztráta pasivního filtru vyššího řádu).
Dalšími důležitými systémovými parametry jsou saturace zesilovače a zotavení po přetížení, přičemž na tyto parametry je lepší nahlížet společně. Vyjdeme z toho, že ideální rozsah vstupního signálu našeho zesilovače bude omezen jeho lineárním výstupním napěťovým rozsahem (vztaženo k napájecímu napětí) a zesílením:
Vinpp = Voutput / zesílení (rovnice 2)
Menší zesílení a vyšší napájecí napětí proto mohou mít na tento parametr pozitivní vliv. Nicméně, menší zisk degraduje šum vstupního napětí a vyšší napájecí napětí zase zvyšuje celkovou spotřebu energie, takže musí zákonitě dojít k určitému kompromisu. Pro přenosné a mid – range systémy se obvykle uvažuje 200 – 400 mVpp. Příčinou saturace ultrazvukového zesilovače je obvykle „únik“ vysokonapěťových impulzů, příp. také silné signály, odražené od objektů blízkých povrchu, kde značně kolísá akustická impedance. Patří sem např. povrchové tkáně nebo kosti, ale ve většině případů ztráta informací z těchto oblastí samotnou diagnózu neovlivní. Důležité informace se ale mohou ztratit, pokud by se správná činnost zesilovače neobnovila včas. Rychlá obnova AFE po přetížení zajišťuje, že ultrazvukové systémy zachytí maximální množství hodnotných informací. Čas obnovy AFE lze definovat jako počet hodinových cyklů A/D převodníku, přičemž ideální prodleva obnovy činí jeden cyklus.
Dalším průvodním jevem saturace bývá větší harmonické zkreslení. Kvůli používání oblíbených kontrastních činitelů stále více a více systémů (dokonce i ty přenosné) požaduje celkové minimální zkreslení druhou harmonickou (HD2), aby se zaručilo hodnověrné zobrazení. Obvykle jsou nasnímané harmonické signály až o 40 dB nižší než ty základní, což závisí na kombinaci akustických vlastností kontrastních činitelů, napětí vysílače nebo také samotné charakteristice tkáně. Každopádně, HD2 daného zesilovače by pro vyhovující zobrazení výsledků 40 dBc překročit nemělo. Díky vysokému zkreslení HD2 se navíc může vyskytnout Dopplerův kmitočtový posun, ovlivňující v určitých situacích dosahovanou přesnost. Ve výsledných snímcích může zmíněný efekt přispět ke směrové izolaci Dopplerova systému (dle některých zdrojů [2;3] můžeme se směrovou izolací v rozmezí 45 až 50 dB vystačit pro oba Dopplerovy systémy, tj. módy CW i PW). Za předpokladu výše uvedených faktorů a při zkreslení HD2 pod 40 dBc pak lze definovat vstupní lineární oblast AFE struktury.
Přeslech, ovlivňující přesnost obrazu, je dalším významným parametrem pro ultrazvukové systémy. Největší přeslechy v řádech –30 až –35 dBc, které vnáší již samotná sonda, bývají ovlivněny roztečí elementů, použitým kmitočtem, způsobem návrhu, materiálem apod. Protože však bude přeslech z integrovaných obvodů nebo z titulu desky plošných spojů mnohem nižší než –35dBc, nedojde tímto způsobem k degradaci parametrů systému.

AFE pro ultrazvuková zařízení
Pro naplnění výše zmíněných kritérií lze s výhodou nasadit např. analogový front – end AFE5804 nebo AFE5805 společnosti TI. Špičkové technologie BiCMOS a CMOS optimalizují výkon i dosahované hladiny šumu. Zatímco BiCMOSový proces je s ohledem na jeho nízkou spotřebu, malé rozměry čipu a nízkou hladinu blikavého šumu optimální pro VCA struktury AFE5804/5, CMOSový proces zase nejlépe nahrává A/D převodníku. Vzájemná kombinace těchto inovací pak zmenšuje dosahovanou velikost o 50 procent a zajišťuje nejnižší spotřebu plně integrovaných AFE i malý šum pro kvalitní obrazové výstupy. Jak konečně ukazuje i připojený obrázek, šumové pozadí je prakticky neměnné v rámci nastavených provozních frekvencí. Přenosné ultrazvukové systémy tak lze navrhovat s ohledem na pokročilou kvalitu zobrazování i minimální spotřebu energie.
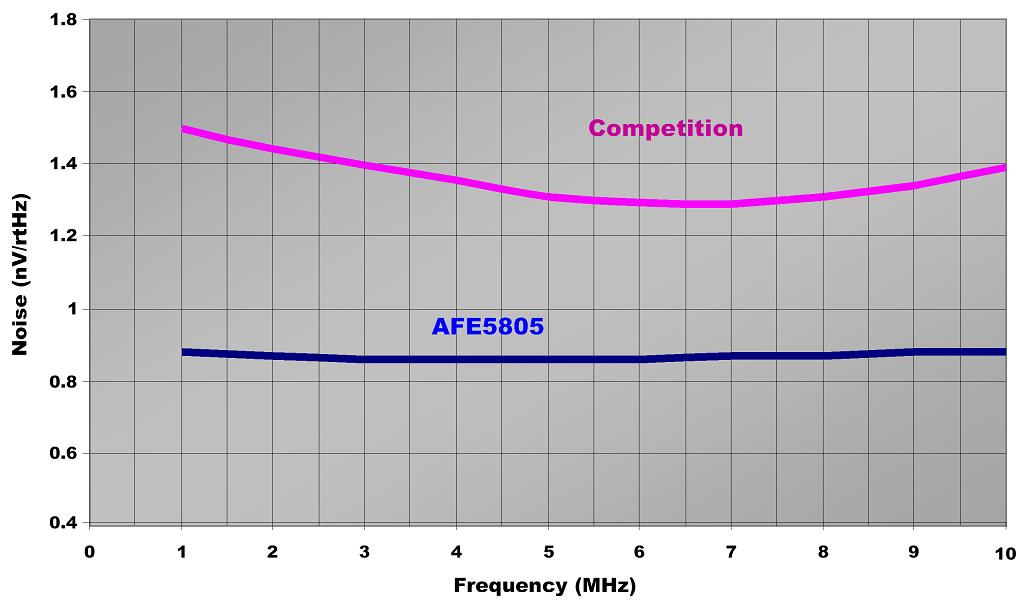
Vynikající šumové vlastnosti AFE5805
Závěr:
Očekává se, že potřeba přenosných a také dostupných ultrazvukových zařízení bude v několika příštích letech po celém světě rychle narůstat, což vhodně nahrává výrobcům zmíněných technologií. Nové špičkové postupy pro vstupní analogové struktury (AFE) umožňují přizpůsobit dosahované vlastnosti pro různé velikosti finálních systémů. Výrobci tak mohou vyvíjet mnoho produktů, založených na stejném základu a přitom šetřit náklady i čas. To se týká jak přenosných zařízení, tak i ultrazvukových systémů střední třídy s vysokou hustotou kanálů.
Použité prameny:
- [1] Evans DH and McDicken WN. Doppler Ultrasound, John Wiley & Sons, LTD, 2000.
- [2] Christopher DA, Burns PN, Armstrong J, Foster FS. A high-frequency continuous-wave Doppler ultrasound system for the detection of blood flow in the microcirculation. Ultrasound Med Biol 1996; 22:1191-1203.
- [3] Christopher DA, Burns PN, Starkoski BG, Foster FS. A high-frequency pulsed-wave Doppler ultrasound system for the detection and imaging of blood flow in the microcirculation. Ultrasound Med Biol 1997; 23:997-1015.
- [4] Pro stažení informací o rodině AFE58xx navštivte www.ti.com/ultrasound
Něco o autorech:
- Xiaochen Xu je systémový a aplikační inženýr v divizi Medical Business Unit společnostiTexas Instruments.
- Stephan Baier je systémový inženýr v divizi the Medical Business Unit společnosti Texas Instruments.
- Harish Venkataraman je konstruktér v divizi Medical Business Unit společnosti Texas Instruments.
- Anand Udupa je konstruktér v divizi High-Speed Data Converter Group společnosti Texas Instruments.



