
Vektorové řízení motoru bez použití snímače otáček(také nazývané řízení orientované na pole neboli FOC-Field Oriented Control) nabízí vynikající účinnost a spolehlivost. Jelikož k řízení nepotřebuje snímač otáček, dochází ke snížení celkových nákladů na výsledný produkt. Implementace vektorového řízení je komplikovaná, takže její využití může prodloužit dobu vývoje.
Na druhou stranu jsou k dispozici vývojové platformy a vývojové desky, které již obsahují bezsenzorový vektorový řídicí software. Pak se lze soustředit jen na aplikační stránku produktu a nezaseknout se na programování řídicího software. Vývojové platformy navíc zahrnují kompletní driver motoru a řízení spotřeby, a to výrazně zkracuje uvedení konečného produktu na trh.
Tento článek stručně popisuje potřeby přesného řízení a vysvětluje rozdíly mezi kartáčovými stejnosměrnými, střídavými indukčními, BLDC a PMSM motory. Nakonec si představíme vývojové desky od společností Texas Instruments , Infineon Technologies a Renesas Electronics.
Přesné řízení pohybu v praxi
Drony jsou složité systémy, které potřebují přesné řízení pohybu a obvykle používají čtyři nebo více motorů. K tomu, aby se dron mohl vznášet, stoupat nebo sestupovat, je zapotřebí přesné a koordinované ovládání pohybu (obrázek 1).
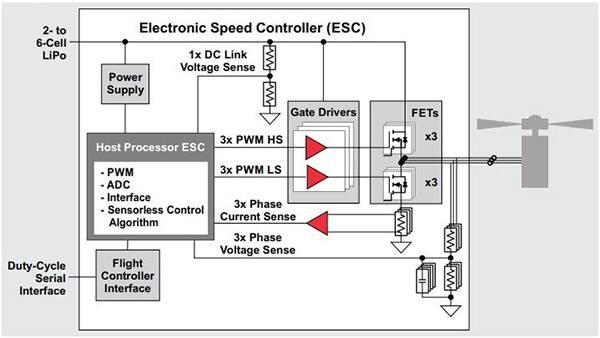
Obrázek 1: Drony používají čtyři nebo více motorů, obvykle BLDC nebo PMSM, jejichž otáčky se pohybují okolo 12 000 otáčkách za minutu (RPM) a jsou poháněny elektronickým regulátorem rychlosti (ESC). Tento příklad ukazuje modul ESC v dronu využívající střídavý motor s bezsenzorovým ovládáním. (Zdroj obrázku: Texas Instruments)
Pokud se dron má vznášet na jednom místě, musí být čistý tah rotorů tlačících dron nahoru vyvážený na všech rotorech a přesně rovný gravitační síle, která jej táhne dolů. Zvýšením tahu (rychlosti) všech rotorů může dron stoupat přímo nahoru. Naopak snížení tahu všech rotorů způsobí sestup dronu. Dron je schopen se otáčet na místě o 360°. K tomu musí mít velmi přesné řízení všech motorů, aby nedocházelo k neočekávaným nakloněním a pohybům.
Přesný a opakovaný pohyb je jednou z funkcí mnoha robotických „chapadel“ v průmyslu. Stacionární víceosý průmyslový robot musí mít pod kontrolou různé množství síly ve třech osách, aby mohl pohybovat objekty různých hmotností a různými směry(obrázek 2). Motory uvnitř robota musí být schopné přesně měnit rychlost a točivý moment (rotační sílu) v přesně stanovených bodech, které řídicí jednotka používá ke koordinaci pohybu podél různých os pro přesnou rychlost a polohování.

Obrázek 2: Stacionární víceosý průmyslový robot musí nastavovat různé síly ve třech osách, aby mohl pohybovat objekty různých hmotností a koordinovat své pohyby s ostatními roboty na montážní lince. (Zdroj obrázku: Texas Instruments)
U mobilních robotů lze k řízení rychlosti i směru pohybu použít přesný systém diferenciálního pohonu. K zajištění pohybu se používají dva motory se dvěma kolečky. Oba motory jsou poháněny různými rychlostmi, aby se dosáhlo otáčení a změny směru. Stejná rychlost pro oba motory má za následek přímý pohyb vpřed nebo vzad. Tímto řízením se dosáhne větší přesnosti pohybu, mechanika je jednodušší, a tím i spolehlivější.
Druhy motoru
Základní stejnosměrné a střídavé indukční motory jsou relativně levné a snadno ovladatelné. Jsou používány v široké škále aplikací, od vysavačů po průmyslové stroje, jeřáby a výtahy. I když jsou levné a snadno ovladatelné, nemohou poskytovat přesné polohovaní. To je vyžadováno aplikacemi, jako jsou robotika, drony, lékařské přístroje a přesné průmyslové stroje.
Jednoduchý kartáčový stejnosměrný motor generuje točivý moment mechanickým přepínáním směru proudu pomocí komutátoru a kartáčů. Mezi nevýhody kartáčových stejnosměrných motorů patří nutnost údržby kvůli opotřebení kartáčů a vznik elektromagnetického rušení a mechanického hluku. K řízení rychlosti otáčení lze použít pulzní šířkovou modulaci (PWM), ale nelze dosáhnout přesné regulace a vysoké účinnosti, kvůli mechanické konstrukci.
BLDC a PMSM motory neobsahují komutátor a kartáče a liší se konstrukci vinutí statoru. Lichoběžníkové vinutí statoru jsou použity v motoru BLDC a vytvořená elektromotorická síla (EMF) má lichoběžníkový tvar vlny. Zatímco statory PMSM jsou vinuty sinusově a produkují sinusovou elektromotorickou sílu EMF (Ebemf ) (obrázek 3).
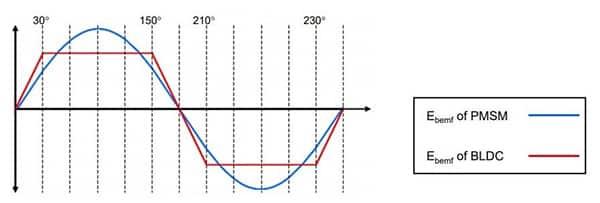
Obrázek 3: PMSM motor generuje sinusový E bemf , zatímco BLDC generuje lichoběžníkovou E bemf vlnu. (Zdroj obrázku: Texas Instruments)
Točivý moment v motorech BLDC a PMSM je funkcí proudu a elektromotorické síly EMF. Tvar proudu BLDC motorů je obdélníkový, zatímco tvar proudu pro PMSM motor je sinusový.
Vlastnosti motoru BLDC:
- Jednodušší ovládání pomocí stejnosměrných proudů se čtvercovými vlnami
- Produkuje výrazné zvlnění točivého momentu
- Nižší výkon a náklady než PMSM
- Lze implementovat pomocí senzorů s Hallovým efektem nebo bezsenzorovým ovládáním
Vlastnost motoru PMSM:
- Složitější řízení pomocí třífázového sinusového PWM
- Žádné zvlnění točivého momentu
- Vyšší účinnost, točivý moment a náklady než BLDC
- Lze implementovat s kodérem hřídele nebo s bezsenzorovým ovládáním
Co je vektorové řízení?
Vektorové řízení je v současné době nejmodernějším způsobem řízení střídavých motorů. Zaručuje optimální chod pohonu jak v ustálených stavech, tak i v přechodných dějích. Účelem vektorového řízení je separovat od celkového statorového proudu momentotvornou část proudu a část tokotvornou (magnetizační). Ve výsledku se docílí stejného chování střídavého stroje jako u stejnosměrného pohonu, kde lze samostatně ovládat magnetizaci motoru i jeho moment. Pro vektorové řízení je nezbytné vyjádřit prostorové vektory jednotlivých napětí, proudů a magnetických toků. Veličiny se vyjadřují v souřadných systémech, které jsou spjaty s tzv. souřadným (ortogonálním) systémem. Například jedna složka definuje magnetický tok motoru, druhá točivý moment. Jádrem algoritmu řízení vektoru jsou dvě matematické transformace:
- Clarkeova transformace - Jedná se o transformaci umožňující přenést tři osy (a, b, c) souřadného systému statoru do dvou navzájem kolmých os (α, β).
- Parkova transformace - Představuje nástroj pro transformaci souřadnic statoru do souřadnic rotoru. Je nutné brát v úvahu, že při otáčení rotoru se mění magnetická vazba mezi statorovým a rotorovým vinutím.
Pomocí Clarkeovy a Parkovy transformace získáme statorové proudy, pomocí kterých můžeme ovládat rotor. To umožňuje systému řízení určit napětí, která by měla být dodávána do statoru, aby se změnil točivý moment na maximum při dynamicky se měnícím zatížení.
Vysoce výkonné řízení rychlosti a polohy motoru vyžaduje přesnou znalost polohy a rychlosti hřídele rotoru v reálném čase, aby bylo možné synchronizovat fázové budicí impulsy s polohou rotoru. Tyto informace se obvykle získávají pomocí senzorů mezi které patří kodéry a magnetické snímače připojené k hřídeli motoru. Tyto snímače mají několik nevýhod: nižší spolehlivost, náchylnost k hluku, vyšší náklady a zvýšení hmotnost motoru a složitost. Bezsenzorové vektorové řízení nepotřebuje snímače rychlosti a polohy motoru.
Výkonné mikroprocesory DSP (digital signal processors) umožňují provádět moderní a efektivní řízení a zajistit tak optimální výkon a účinnost řízení pro jakýkoli motorový systém v reálném čase. V důsledku zvyšujícího se výpočetního výkonu a klesajících cen DSP procesorů dochází k rozšiřování použití bezsenzorového řízení a původní řízení se snímači nebo proměnné skalární řízení se pomalu vytrácí.
Řízení třífázových PMSM a BLDC motorů
Složitost vektorového řízení lze obejít pomocí hotové vývojové desky. Například DRV8301-69M-KIT od společnosti Texas Instruments, kde základ tvoří modul DIMM100 controlCARD, lze použít k vývoji třífázových driverů pro motory PMSM / BLDC (obrázek 4). Vývojová deska obsahuje budič DRV8301 se zesilovači proudu, buck regulátor a mikrokontroler Piccolo TMS320F28069M s podporou InstaSPIN.

Obrázek 4: Sada DRV8301-69M-KIT, která obsahuje DRV8301 a desku Piccolo TMS320F28069M s podporou InstaSPIN. (Zdroj obrázku: Texas Instruments)
Sada DRV8301-69M-KIT obsahuje karty InstaSPIN-FOC a InstaSPIN-MOTION pro řízení třífázových motorů PMSM a BLDC. InstaSPIN umožňuje rychle identifikovat, automaticky naladit a ovládat třífázový motor. Tím poskytuje „okamžitě“ stabilní a funkční systém řízení motoru o napětí 60 V a proudu až 40 A. Tyto motory se používají v čerpadlech, pohonech bran, výtahů a ventilátorů a jsou součástí průmyslové i spotřebitelské robotiky a automatizace.
Hardwarové vlastnosti DRV8301-69M-KIT:
- Třífázová deska s rozhraním pro DIMM100 controlCARD
- Integrovaný napájecí modul třífázového střídače DRV8301 (s integrovaným buck převodníkem 1,5 A) podporující až 60 voltů a nepřetržitý proud 40 A
- Karty TMDSCNCD28069MISO InstaSPIN-FOC a InstaSPIN-MOTION
- Schopnost pracovat s TMDXCNCD28054MISO (prodává se samostatně) a TMDSCNCD28027F + Externí Emulátor (prodává se samostatně)
Řízení motorů PMSM a BLDC s velkým výkonem
EVAL-IMM101T od Infineon Technologies je plně vybavená sada, která obsahuje IMM101T inteligentní IPM (integrovaný napájecí modul), která obsahuje vysokonapěťovou motorovou jednotku pro řízení výkonných motorů PMSM / BLDC (obrázek 5). EVAL-IMM101T obsahuje další nezbytné obvody potřebné pro vývoj a práci s napájecím modulem IMM101T Smart IPM. Mezi tyto obvody patří usměrňovač, EMI filtr a izolovaný debugger s USB připojením k PC.
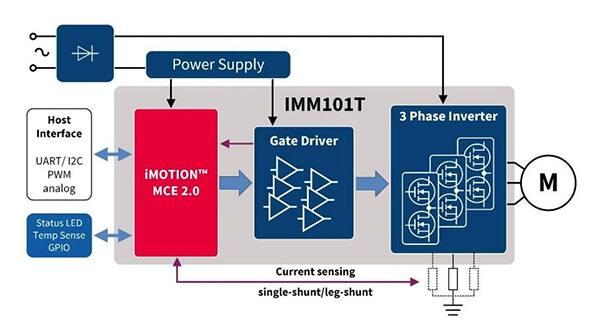
Obrázek 5: Deska IMM101T eval je kompletní řešení zahrnující engine pro řízení pohybu (MCE 2.0), budiče bran výkonových tranzistoů a 3fázový měnič schopný řídit PMSM a BLDC motory pomocí FOC čili bez senzoru. (Zdroj obrázku: Infineon Technologies)
Sada EVAL-IMM101T byla vyvinuta pro první kroky při vývoji aplikací s inteligentním napájecím modulem IPM IMM101T. Deska je vybavena všemi montážními rozhraními pro bezsenzorové FOC. Obsahuje jednofázový AC konektor, EMI filtr, usměrňovač a třífázové rozhraní pro připojení motoru. Výkonový stupeň také obsahuje směšovač zdroje pro snímání proudu a dělič napětí pro měření stejnosměrné složky napětí.
Infineon IMM101T nabízí různé možnosti konfigurace řízení pohonů PMSM / BLDC v kompaktním pouzdru o velikosti 12 x 12 milimetrů pro povrchovou montáž. Pouzdro je tepelně vylepšeno tak, aby mohlo bezproblémově fungovat s chladičem i bez něj. Pouzdro vykazuje tzv. creepage distance 1,3 mm mezi vysokonapěťovými podložkami pod pouzdrem. To usnadňuje povrchovou montáž a zvyšuje robustnost systému.
Řada IMM100 nabízí buď 500V FredFET nebo 650V CoolMOS MOSFET. V závislosti na integrovaných výkonových MOSFETech řada IMM100 pokrývá aplikace se jmenovitým výstupním výkonem od 25 W do 80 W s maximálním stejnosměrným napětím 500 V / 600 V.
Řízení 24 voltových motorů
Pro řízení 24V PMSM / BLDC motorů je k dispozici vývojová sada RTK0EM0006S01212BJ od společnosti Renesas (obrázek 6). Základem tvoří 32 bitový mikrokontroler RX23T, který má vestavěnou výpočetní jednotku s pohyblivou čárkou (FPU), a proto je vhodný ke zpracování složitých řídicích algoritmů měniče.

Obrázek 6: Vývojová deska s mikrokontrolerem RX23T obsahuje výkonovou desku pro řízení PMSM. (Zdroj obrázku: Renesas Electronics)
Mikrokontroler v pohotovostním režimu (s retencí RAM) spotřebovává pouze 0,45 μA. Napájení těchto mikrokontrolerů se pohybuje v rozmezí od 2,7 do 5,5 V a je pinově i softwarově kompatibilní s řadou RX62T. Sada obsahuje:
- 24voltovou výkonovou desku
- Funkce řízení PMSM
- Tři shunt rezistory pro snímání proudu
- Funkce nadproudové ochrany
- CPU karta pro mikrokontroler RX23T
- Kabel USB mini B
- PMSM motor
Závěr
Použití bezsenzorového vektorového řízení s motory BLDC a PMS snižují náklady a zvyšují spolehlivost a přesnost. Vývoj bezsenzorového vektorového řízení je složitý a časově náročný proces. Ke zjednodušení celého vývoje je vhodné použít vývojové platformy, které již obsahují veškerý software a hardware pro vektorové řízení. Tato vývojová prostředí navíc zahrnují veškerý hardware pro správu napájení, který významně zkrátí dobu vývoje.
Článek vyšel v originále na webu DigiKey.com, autorem je Jeff Shepard.



