
Autonómny robot pre mini sumo
Súťaž robotov v kategórií mini sumo je populárna po celom svete. Jej hlavnou úlohou je zoskupovať mladých nadšencov robotiky, ktorí predvádzajú svoje nápady a inovácie na svojich robotoch. Súťaže robotiky si získavajú stále viac svojich priaznivcov, či už medzi odbornou verejnosťou alebo laikmi.
Pravidlá súťaže
Aby sa robot mohol zúčastniť sútaže, musí splniť dve hlavné kritériá. Prvým kritériom je hmotnostné obmedzenie robota do 500 g, ktoré je občas dosť limitujúce, a preto si musí súťažiaci riadne rozmyslieť, akú konštrukciu použije. Druhé kritérium sa týka maximálnych povolených rozmerov robota, ktoré sú stanovené na 10 x 10 cm. Samozrejme, robot by nemal poškodiť súpera, a nie sú dovolené ani tažké zbrane, ako možno poznáte zo súťaže robotov „robotwars“, ktoré sú populárne hlavne v USA.
Ring je plochý disk, na ktorom roboti súťažia. Rozmery ringu sú dané tabuľkou.
Základný povrch je matný čierny, okraje ringu sú lesklé biele. Štartovné čiary sú hnedé. Povrch ringu je jednoliaty a neobsahuje žiadne predely alebo vyvýšeniny, ktoré by mohli ovplyvniť pohyby robota. [1]
Tab 2.1.1: Rozmery súťažného ringu:

Zápas pozostáva zo 4 častí, a to z predzápasovej kontroly, umiestnenia robotov do ringu, aktivácie a ukončenia zápasu. [1]
- Prezápasová kontrola pozostáva z váženia a merania rozmerov robota, či spĺňa pravidlá na zápas.
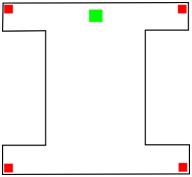
- Umiestnenie robotov do ringu sa môže líšiť v závislosti od podujatia. Pri prvom zápase sa rozhodne o poradí postavenia robotov hádzaním mincou, víťazný sútažiaci umiestňuje svojho robota do ringu ako prvý. V ďalších kolách umiestňuje ako prvý svojho robota víťaz predošlého kola. Ak nastala remíza, opäť sa rozhoduje hadzaním mince.
Obr. 2.1.1: Umiestnenie robotov
Aktivácia robota sa vykoná na pokyn rozhodcu. Robot môže byť aktivovaný ľubovoľným spôsobom, ako napríklad stlačením tlačidla, tlesknutím alebo diaľkovým ovládaním. Po vykonaní aktivácie robota musí ubehnúť určený časový limit (zvyčajne 5 sekúnd), a až po uplynutí tohto časového limitu sa môže robot začať hýbať. V prípade ak sa robot pohne skôr ako uplynie tento časový limit, súťažiaci kolo prehráva.
Za ukončenie zápasu sa považuje, ak sa robot akoukoľvek časťou dotkne plochy mimo ringu, a to aj tou, ktorá mu počas zápasu odpadne. Hrana ringu sa nepočíta ako plocha mimo ringu. Lem ringu sa už počíta ako plocha mimo ringu.
Ak nedôjde k vyradeniu ani jedného zo súťažiacich robotov, je zápas po troch minútach ukončený rozhodcom ako remíza. [1]
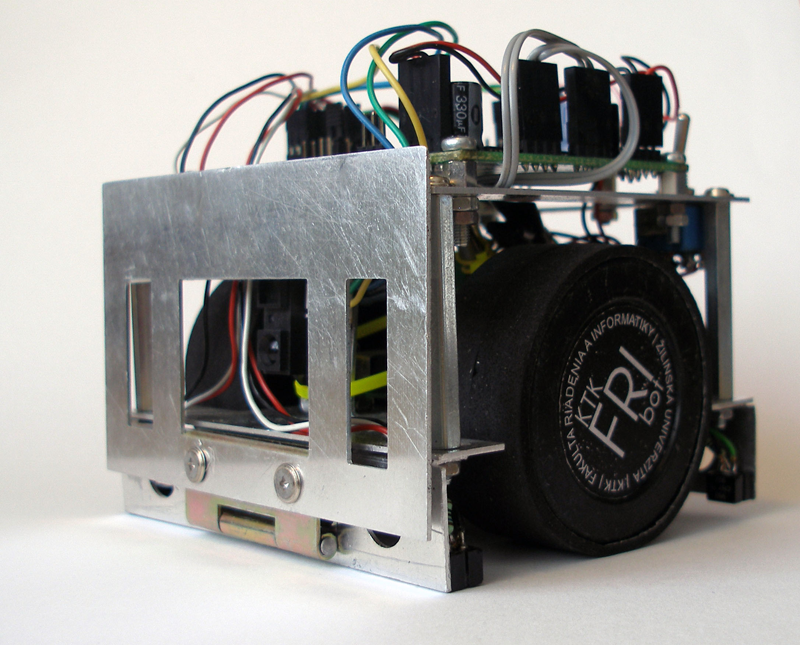
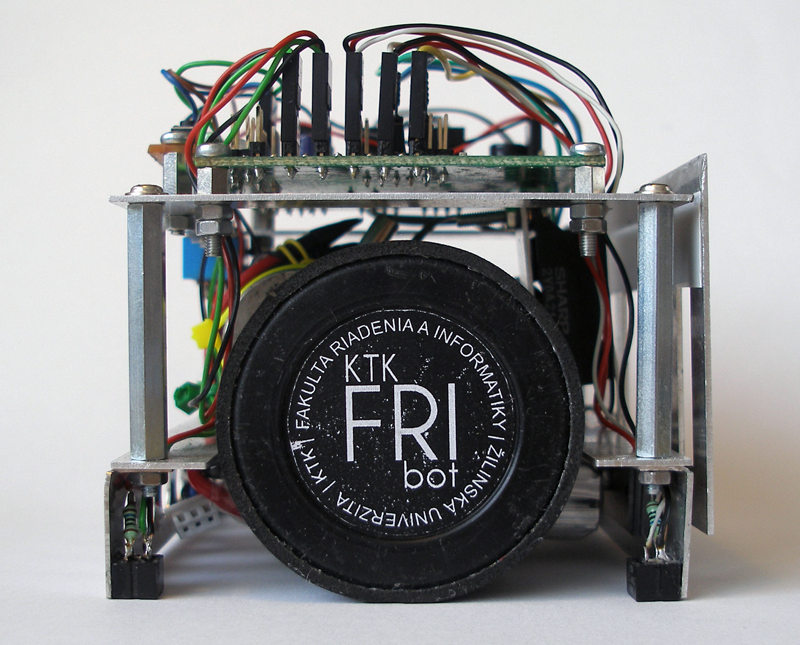
Návrh a popis konštruckie
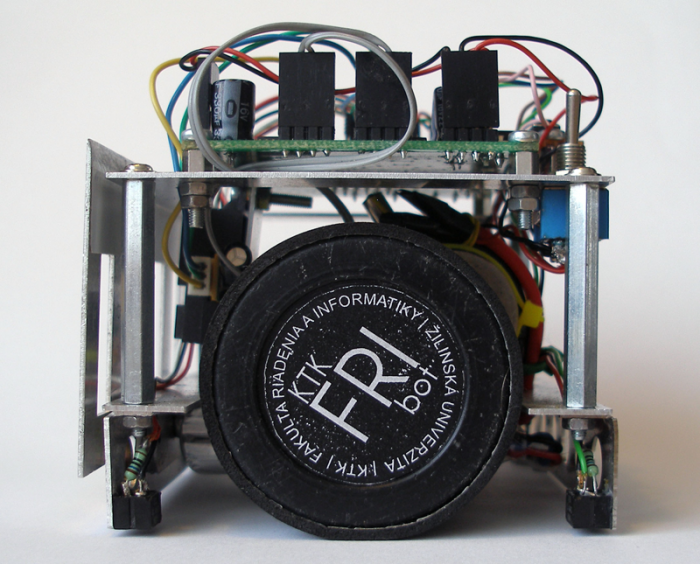
Ako materiál konštrukcie som zvolil hliníkový plech o hrúbke 1mm pre jeho výhodné vlastnosti ako sú nízka hmotnosť, dostatočná pevnosť a ľahká manipulácia.
Konštrukcia robota je inšpirovaná návrhovým modelom tank [2], ktorý ma dve samostatne poháňané kolesá. Kolesá sú poháňané dvoma motorčekmi Micro Metal Gearmotor HP s prevodovkou 150:1. Motorčeky majú rýchlosť otáčania 200 rpm pri napájaní 6V. Pri priemere koliesok 52 mm možeme určiť rýchlosť pohybu:[3]
![]() , (2.2.1)
, (2.2.1)
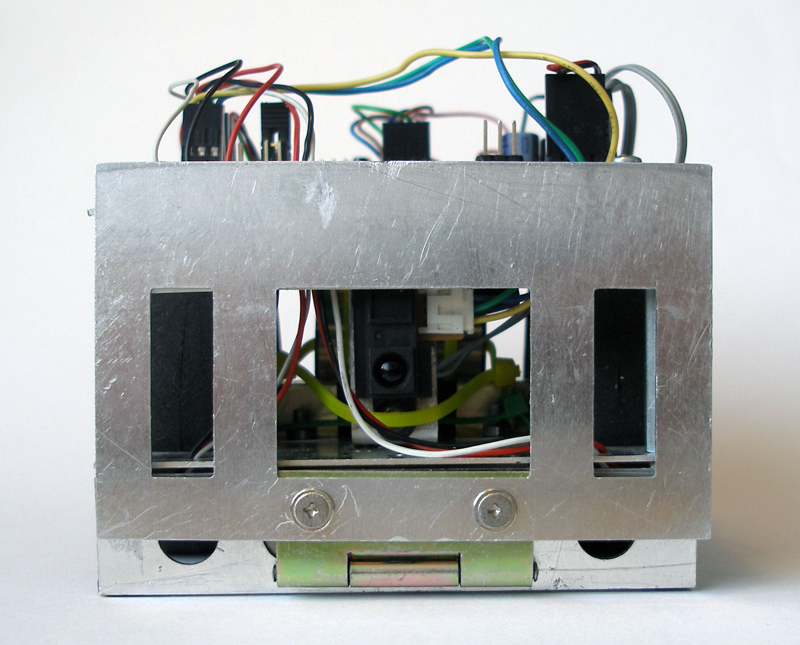
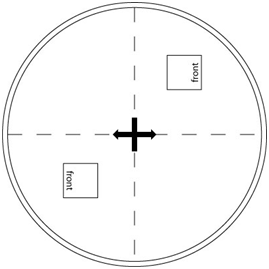
Jednou z najdôležitejších častí robota sú senzory, vďaka ktorým vie robot určiť, či sa nachádza na okraji ringu, alebo kde sa nachádza súper. Na detekciu okraja ringu som použil senzor CNY70, ktorý je znázornený na obrázku 2.2.1 červenou farbou. Zelenou farbou je znázornený analógový senzor sharp GP2Y0A21YK0F na detekciu súpera, ktorý má dosah až 80 cm.
Obr. 2.2.1: Rozmiestnenie senzorov
Hardwarové vybavenie robota
Ako mozog riadiacej jednotky je použitý 8 bitový mikrokontroler od firmy Freescale, a to MC68HC908GR16A. Je to starší mikrokontroler z rodiny mikrokontrolerov s jadrom M68HC08, ktorý ale úplne postačuje pre dané účely. [4]
Zvolené MCU sa nachádza v 32 pinovom LQFP púzdre, ktoré obsahuje tieto porty:
-
-
- 4 bitový port A (PTA0 – PTA3) - 4 pinový KBI modul
- 6 bitový port B (PTB0 – PTB5) - 6 kanálový ADC modul
- 2 bitový port C (PTC0 – PTC1)
- 7 bitový port D (PTD0 – PTD6) - zdieľaný medzi SPI, TIM1 a TIM2
- 2 bitový port E (PTE0 – PTE1) - ESCI modul
-
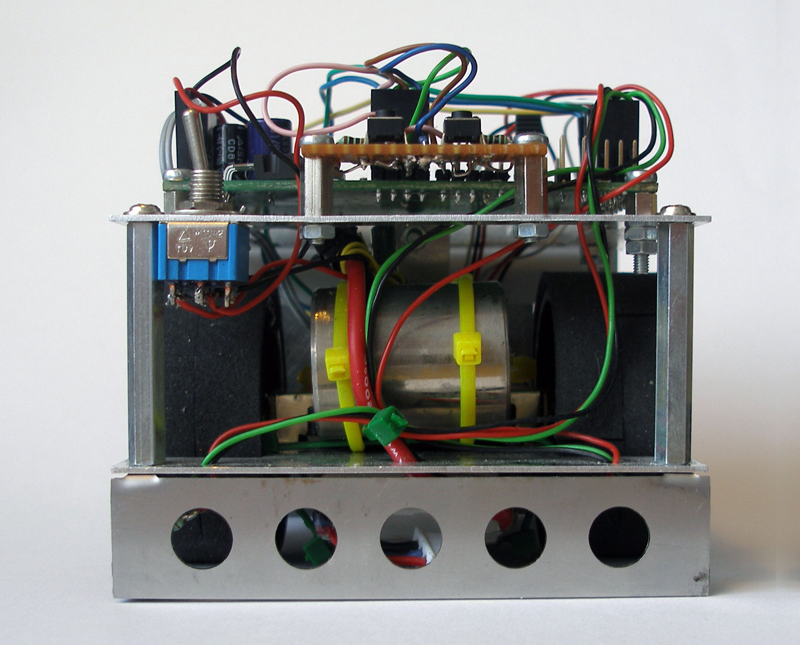
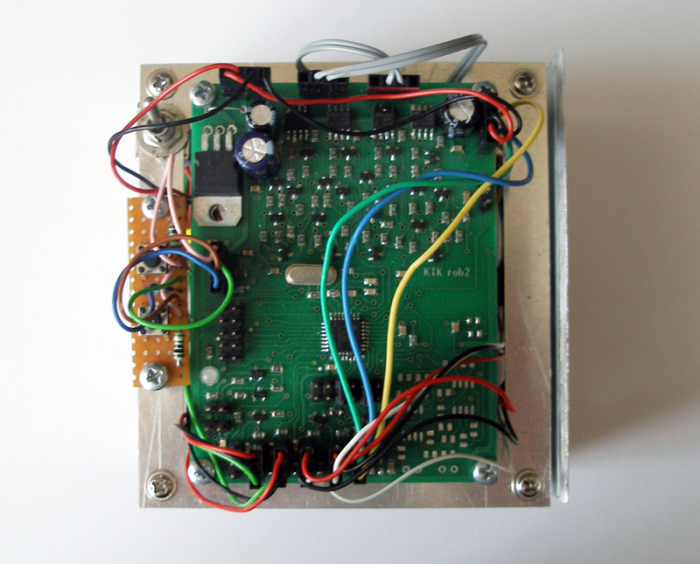
Riadiaca doska, ktorú som použil bola navrhnutá Katedrou technickej kybernetiky (KTK) na fakulte FRI. Táto doska obsahuje všetko potrebné na riadenie robota, ako je napríklad riadenie motorov.
Riadiaca doska je rozšírená o analógový senzor Sharp GP2Y0A21YK0F, ktorý má rozsah do 10 - 80 cm, 4 čiarové senzory CNY70 a 2 tlačidlá na ovládanie súťažných módov, nastavovanie citlivosti senzorov a ŠTART a STOP tlačidlo.
Softwarové vybavenie robota
Pomocou tlačidiel je možné vybrať z dvoch bojových módov. Prvý bojový mód pozostáva z aktívneho vyhľadávania súpera. V prípade ak zaznamená súpera analógovým senzorom, vyštaruje dopredu, inak sa točí na mieste a snaží sa nájsť súpera. Druhý mód využíva náhodný pohyb po ringu a spolieha sa na náhodu, že ho naberie vydlicou a vytlačí. Tento mód teda nepoužíva analógový senzor na nájdenie súpera, ale iba čiarové senzory, aby nevypadol z ringu tak, ako aj pri móde 1.
Oba módy rátajú s 5 sekundovou pauzou po stlačení tlačiadla ŠTART kvôli pravidlám súťaže.
Programové vybavenie je vcelku jednoduché a pozostáva zo základných rutín ako čítanie hodnôt z AD prevodníka, generovanie PWM-ky na riadenie motorov a riadiacich algoritmov.
Ukážka súťaže v Bratislave
Ukážka súťaže vo Viedni
Záver
Keďže toto bol môj prvý autonómny robot pre sútťaž mini sumo, má aj svoje nedostatky, ktoré budú odstránené v druhej verzii tohto robota. Robot sa zúčastnil už dvoch súťaží: vo Viedni na Robotchallenge a v Bratislave na Istrobote.
Poďakovanie
Chcel by som poďakovať všetkým, ktorí mi akýmkoľvek spôsobom pomohli pri spracovaní tejto práce. Moje poďakovanie patrí najmä môjmu vedúcemu práce, doc. Ing. Jurajovi Mičekovi PhD., za cenné rady a usmernenia.
Zoznam literatúry
- http://www.robotika.sk/contest/2010/minisumo.php, ISTROBOT , dostupné 27.4.2010
- http://robotika.cz/guide/odometry/cs, Robotika.cz, dostupné 5.12.2005
- http://www.pololu.com/catalog/product/997, Pololu.com, dostupné 27.4.2020
- MC68HC908GR16A Data Sheet, Rev. 1.0,



