V úterý, dne 29 května 2007, proběhlo na Žilinské Universitě vyhodnocení soutěže vývojových prací studentů se součástkami Freescale pod názvem "Freescale Technology Days". Vývojové práce studentů byly realizovány v rámci soutěže Freescale Semiconductor, která probíhala v úzké spolupráci s Žilinskou Universitou. hlavním organizátorem soutěže byl Dr. Makys. K vidění byly např. projekty "ultrazvuková baterka", "reklamní vizualizační zařízení", "momentové řízení motorů", atd. Některé z těchto velmi zajímavých konstrukcí budeme pravidelně zveřejňovat na našem serveru. Dnes se podíváme na zdařilou konstrukci "Řízení pohonu akumulátorové vrtačky" studenta již zmiňované Žilinské University Juraje Breskovce.
![]() Na svete existuje v súčasnosti mnoho druhov akumulátorového náradia s jednosmerným motorom s permanentnými magnetmi (bezšňúrové vŕtačky, skrutkovače, elektrické zubné kefky ale i napr. hračky ). Používajú sa všade tam, kde nie je prístup k rozvodom elektrickej energie ( na chatách, chalupách, lodiach, vo vesmíre a pod. ) Jeho rozvoj umožnili nové druhy výkonnejších a ľahších akumulátorov a v súčasnosti dokonca vytláčajú klasické elektrické náradie v triede nízkych výkonov. Tieto aplikácie sú väčšinou riadené veľmi jednoducho, v otvorenej slučke s reguláciou napätia metódou PWM generovanou jedným časovačom. Prečo teda na riadenie požiť mikropočítač?
Na svete existuje v súčasnosti mnoho druhov akumulátorového náradia s jednosmerným motorom s permanentnými magnetmi (bezšňúrové vŕtačky, skrutkovače, elektrické zubné kefky ale i napr. hračky ). Používajú sa všade tam, kde nie je prístup k rozvodom elektrickej energie ( na chatách, chalupách, lodiach, vo vesmíre a pod. ) Jeho rozvoj umožnili nové druhy výkonnejších a ľahších akumulátorov a v súčasnosti dokonca vytláčajú klasické elektrické náradie v triede nízkych výkonov. Tieto aplikácie sú väčšinou riadené veľmi jednoducho, v otvorenej slučke s reguláciou napätia metódou PWM generovanou jedným časovačom. Prečo teda na riadenie požiť mikropočítač?
V súčasnosti sa táto súčiastka nachádza vo všetkých sofistikovaných zariadeniach, pri zachovaní nízkej ceny. V tejto diplomovej práci som sa pokúsil zostrojiť akumulátorovú vŕtačku riadenú 8–bitovým mikroprocesorom. Použitie mikroprocesora v aplikácii mi umožňuje implementáciu niektorých pokročilých metód riadenia, ako je napríklad ľahká zmena programu, bezsnímačové riadenie otáčiek v uzavretej slučke, alebo elektronická regulácia momentu.
Elektronická regulácia momentu nahrádza drahšiu mechanickú preklzovaciu spojku ( v aplikáciách ako sú skrutkovače a vŕtačky ), čím znižuje celkovú cenu zariadenia.
Čo sa týka bezsnímačového riadenia otáčok v uzavretej slučke, takéto riadenie sa nachádza len v pohonoch „vyššej triedy“ a pridáva na celkovom výkone zariadenia.
Niečo o mojej vŕtačke
AKU vŕtačka, ktorú som si vybral pre úpravu je od výrobcu KRAFTtech model CDD01240. Je to jednorýchlostná vŕtačka s preklzovaciou spojkou a s jednosmerným motorm s permanentnými magnetmi. Batéria je 24 V – NiCd. Otáčky sú riadené v otvorenej regulačnej slučke t.j. bez spätnej väzby.

Požiadavky na mikropočítačom riadenú AKU vŕtačku
Po úprave by mala mať táto vŕtačka niektoré výhodnejšie vlastnosti:
-
Bezsnímačové riadenie otáčok na konštantnú hodnotu
- Elektronicky nastaviteľný maximálny moment
- Signalizácia podpätia
- Možnosť sledovať priebehy veličín na PC
- Možnosť zmeny parametrov programu priamo z PC
- Voľba rôznych režimov riadenia
Popis režimov AKU vŕtačky
Upravená AKU vŕtačka má tri režimy riadenia:
- Kaskádna regulácia – Otáčky sú riadené v uzavretej regulačnej slučke na konštatnú hodnotu. Otáčky sú odhadované estimátorom. Žiadaná hodnota otáčok sa nastavuje posuvným potenciometrom na rukoväti vŕtačky, maximálny moment sa nastavuje otočným potenciometrom na vrchu vŕtačky. Tento režim je indikovaný neprerušovaným svitom žltej LED diódy.
- Otvorená slučka – napätie motora je riadené priamo podľa hodnoty z posuvného potenciometra umiestneného na rukoväti vŕtačky. Po zaťažení otáčky poklesnú. Tento režim signalizuje svietiaca, zelená LED dióda.
- Impulzný režim – Je určený pre odťahovanie väčších priemerov matíc a skrutiek. Na svorky motora je privádzané striedavo maximálne napätie batérie a nulové napätie. Takýmto spôsobom je vytvorený rázový moment. Režim je indikovaný súhlasným blikaním oboch LED diód.
Použité algoritmy
Ako hlavnú riadiacu štruktúru som vybral kaskádnu reguláciu. Jej bloková schéma je na nasledujúcom obrázku:
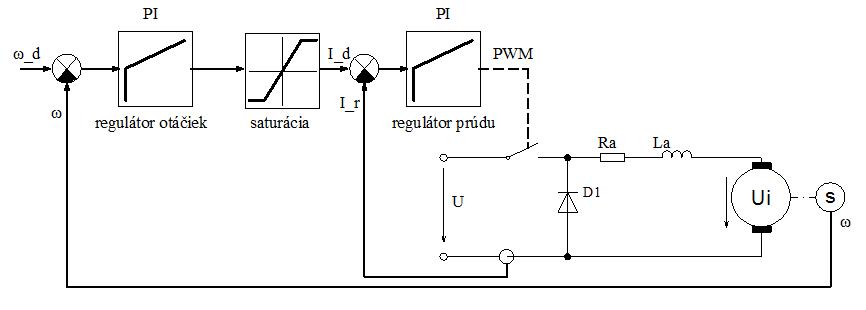
Výstup z nadradeného PI regulátora (žiadaný prúd Id) je obmedzený saturáciou pre nastavenie maximálneho momentu ( ![]() ). Výstupom z podriadeného PI regulátora je strieda PWM signálu pre nastavenie napätia motora ua. Prúd je snímaný vždy uprostred aktívnej časti PWM periódy pomocou meracieho odporu prúdu.
). Výstupom z podriadeného PI regulátora je strieda PWM signálu pre nastavenie napätia motora ua. Prúd je snímaný vždy uprostred aktívnej časti PWM periódy pomocou meracieho odporu prúdu.
PI regulátor a Anti Wind-up
PI regulátor v číslicovej podobe sa nazýva PS regulátor (proporcinálno–sumačný). Ja som použil PS regulátor s lichobežníkovou integráciou v prírastkovej forme. Jeho rovnica je nasledujúca:

Anti Wind-up je realizovaný obmedzením akčnej veličiny na hodnoty (umin, umax), tým je ošetrené aj pretekanie premenných v 8bitovom mikropočítači.
Snímač otáčok (estimátor)
Pre určenie aktuálnej hodnoty otáčok som použil estimátor, ktorý vychádza z napäťovej rovnice js motora s permanentnými magnetmi.
Zanedbaním indukčnosti La dostaneme rovnicu estimátora otáčok:
![]() .
.
Napätie na svorkách motora ua, poznáme a prúd motra ia meriame, R=konštanta. Potom môžeme vypočítať otáčky podľa vzťahu:
 , pričom CΦM = konštanta.
, pričom CΦM = konštanta.
Filter prúdu
Zosnímaný prúd i napätie mali veľké zašumenie, ako filter som použil číslicový filter nazývajúci sa exponenciálny filter alebo filter s dynamikou prvého rádu. Jeho rovnica je nasledujúca:
![]() ,
,

Popis zapojenia
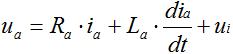
Silová časť zapojenia je jednokvadrantový napäťový menič. Ako spínací prvok je požitý Mosfet tranzistor IRFZ46N (T1), dióda D0 je jednoduchá usmerňovacia dióda 1N5408, merací odpor Rcs je umiestnený na DPS, jeho hodnota je 40mΩ a maximálny výkon 4W. Prepínač smeru je pôvodný, je umiestnený v rukoväti vŕtačky. Riadiaca časť zapojenia je umiestnená na DPS.
Na nasledujúcom obrázku je zobrazená podrobná schéma zapojenia. Všetky súčiastky sú s púzdrom pre povrchovú montáž (SMD z angl. Surface Mount Devices), okrem troch: zenerovej diódy D3, budiča IR2125 a mikroprocesora MC9S08QG8. Môžeme ju rozdeliť do piatich hlavných častí: napájací zdroj 3,3 V, budič so svojim zdrojom 16 V, meranie prúdu, meranie napätia batérie a mikroprocesor.

Hlavnou súčiastkou napájacieho zdroja 3,3 V je všeobecne známy stabilizátor LM317, ktorého výstupné napätie je nastavené pomocou rezistorov R2, R3. Na jeho vstupe i výstupe sú podľa odporúčania výrobcu zapojené dva kondenzátory. Jeden je vždy keramický a druhý (ten s vyššou kapacitou) tantalový z dôvodu úspory miesta.
Budič IR2125 je určený na budenie spínacích MOSFET tranzistorov zapojených vo vrchnej, alebo spodnej časti meniča. Tento budič umožňuje zabudovať nadprúdovú ochranu, ktorú som však nepoužil, pretože nadprúd obmedzujem iba v programe.
Ďalšou jeho črtou je, že sa automaticky uzavrie pri poklese napájecieho napätia pod 9 V. Táto jeho vlastnosť je však viac menej nevýhodou, pretože tranzistor môže byť spínaný i napätím 5 V, a teda tento budič neumožňuje naplno využiť kapacitu batérie. Na druhej strane, s veľkou rezervou chráni použitý MOSFET tranzistor. Zapojenie pomocných súčiastok je opäť realizované podľa odporúčania výrobcu. Zdroj budiča 16 V je riešený pomocou deliča napätia, zloženého zo zenerovej diódy D3 a odporu R10. Pretekajúci prúd je 8 mA a výsledné napätie je akumulované v tantalovom kondenzátore C2.
Meranie prúdu je uskutočnené pomocou meracieho odporu Rcs a diferenčného zapojenia operačného zosilňovača IC2. IC2 je nízkonapäťový „rail-to-rail“ operačný zosilňovač MC33502. „Rail-to-rail“ znamená, že napätie na jeho vstupe alebo výstupe sa môže meniť takmer úplne v rozsahu napájacích napätí. V tomto prípade sa výstupné napätie môže meniť v rozsahu 50 mV od každého napájacieho napätia. Jediná chyba môže nastať pri veľmi malých prúdoch a tá môže byť eliminovaná v programe.
Napätie batérie je zisťované pomocou odporového deliča R6, R9 a je priamo pripojené na A/D prevodník mikroprocesora. Mikroprocesor MC9S08QG8 potrebuje len minimum externých súčiastok, nepotrebuje externý oscilátor, ani žiadne „pull-up“ rezistory. Stačí mu priviesť napätie 3,3 V s jednoduchým filtrom tvoreným jediným kondenzátorom a vodič pre programovanie a komunikáciu s osobným počítačom (BKGD pin). Pri výbere vhodného riadiaceho prvku som bral do úvahy dostupnosť tejto súčiastky, dostupnosť jej programátora a vývojového prostredia, aby mala táto súčiastka dostatok výstupov a aspoň jeden PWM výstup. Z týchto požiadaviek mi vyšiel 8bitový mikroprocesor od firmy Freescale Semiconductors - MC9S08QG8
Tento mikroprocesor charakterizujú tieto vlastnosti:
- 8K bytová pamäť programu a 128 bytová pamäť RAM,
- 2 kanálový PWM modulátor,
- 8-kanálový, 10-bitový A/D prevodník,
- SCI - zabudovaná sériová komunikácia,
- ICS - vnútorný oscilátor s frekvenciou do 20MHz,
- 12 – vstupno /výstupných pinov, 1 len vstupný, 1 len výstupný,
- 16-pinové PDIP puzdro,
- integrované pull-up rezistory.
Pre jeho naprogramovanie je dostupné vývojové štúdio CodeWarrior v5.0 for Freescale™ HC(S)08 Microcontrollers. CodeWarrior ponúka niekoľko, pre užívateľa veľmi výhodných možností ( možnosť programovania v jazyku C, v assemblery, grafické prostredie nastavovania jednotlivých registrov a iné ). Pre grafické zobrazovanie premenných MCU je zadarmo dostupná aplikácia FreeMaster, umožňujúca riadenie vzdialených (embedded – zabudovaných ) aplikácií pomocou grafického rozhrania bežiacom na osobnom počítači. Niektoré z vlastností FreeMastera:
- grafické prostredie,
- jednoduché ovládanie,
- pripojenie pomocou sériovej linky RS232, alebo portu BDM,
- prístup v reálnom čase k premenným v jazyku C v sledovanej aplikácii,
- zobrazenie sledovaných premenných graficky krivkou ( Scope ),
- niektoré transformácie pre reálne premenné,
- zobrazenie premenných v rôznych formátoch ( ako reálne, binárne, hexadecimálne, decimálne alebo ASCII číslo ),
- vzdialená kontrola cez internet.
Namerané výsledky:
Nasledujúce priebehy boli zosnímané v režime Kaskádnej regulácie, pomocou programu FreeMaster . Jednotlivé veličiny sú vyjadrené v 8bitových celých číslach.
Regulácia otáčok a estimátor otáčok:
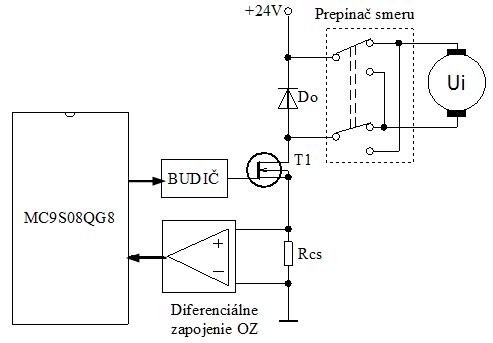
Priebehy sledovaných veličín sú zobrazené na nasledujúcom obrázku. V čase t1 som rotor motora zabrzdil, čo správne odhadol aj estimátor otáčok. Otáčkový PI regulátor si vyžiadal najvyššiu povolenú hodnotu prúdu Imax, napätie batérie výrazne pokleslo. Poklesla i akčná veličina, pretože v motore je nulové indukované napätie (zabrzdený rotor), čo je zásluha prúdového regulátora. V čase t2 som rotor odbrzdil. V nasledujúcej sekunde je vidieť regulačný proces, až pokým sa otáčky neustália na požadovanej hodnote. Otáčky majú mierne preregulovanie, čo sa dá upraviť zmenou parametrov regulátora. Rotor motora nebrzdí žiadna záťaž, ak nerátame moment strát motora a brzdný moment prevodovky vŕtačky. V čase t3 bol rotor opäť zabrzdený.
Význam jednotlivých premenných: Wrx – vyfiltrovaná hodnota odhadnutých otáčok, Irx – vyfiltrovaný prúd motora, ratio – akčná veličina (strieda PWM signálu), Wd – žiadaná hodnota otáčok, Napx – vyfiltrovaná hodnota napätia batérie.
Regulátor prúdu a filter prúdu:
Nasledujúci priebeh som zosnímal pri nulovom zaťažení. Zobrazuje nábeh prúdu na žiadanú hodnotu bez nadradeného regulátora otáčiek ( žiadanú hodnotu som zadal pomocou programu FreeMaster).

Súčasne dokazuje význam použitého exponenciálneho filtra, pretože meraný prúd je značne rozkmitaný a pre reguláciu nepoužiteľný. Skutočný nameraný prúd je rozkmitaný s ešte väčšou frekvenciou, čo však FreeMaster nezobrazí, pretože nesníma každú zmenu premennej, ale iba určité násobky. Ku koncu sledovaného priebehu je prúd menej rozkmitaný vďaka zvyšujúcemu sa indukovanému napätiu (zvyšuje sa spolu s otáčkami). Žiadaná hodnota zodpovedá strednej hodnote prúdu 1,22 A. Ir – nameraná hodnota prúdu, Irx – vyfiltrovaná hodnota prúdu.
Záver:
Na záver môžem skonštatovať, že skonštruované zapojenie pracuje správne, otáčky sú riadené na požadovanú hodnotu a celý systém je zabudovaný vnútri predávanej AKU vŕtačky. Dá sa teda povedať, že neriadená AKU vŕtačka bola úspešne prerobená na omnoho sofistikovanejší ručný nástroj. Zapojeniu by som však vytkol dve chyby, tou prvou je samočinné uzatváranie budiča a tou druhou je snímanie prúdu až od určitej hodnoty.
Samočinné uzatváranie je spôsobené zabudovanou ochranou budiča proti nízkemu napätiu (pod 9 V), ktorým by bol ohrozený MOSFET tranzistor. Táto jeho vlastnosť je však viac menej nevýhodou, pretože použitý MOSFET môže byť spínaný i napätím 5 V. Ak sa budič samočinne uzavrie, MCU nemá o tom žiadnu informáciu, to spôsobuje nesprávny výpočet otáčok. Našťastie sa táto situácia vyskytuje iba pri takmer vyčerpanej batérii. Odstrániť by sa dala výberom lepšieho typu budiča s podobnými vlastnosťami.
Snímanie prúdu je realizované zosilnením úbytku napätia na meracom odpore prúdu (40 mΩ) pomocou OZ typu MC33502, ktorý je síce „rail-to-rail“ ale pracuje až od vstupného napätia 50 mV. Teda správnu informáciu o hodnote prúdu sa dozvieme asi až od hodnoty prúdu 1A. Našťastie 1 A je v tomto prípade malá hodnota a chyba sa prejaví iba pri veľmi malých rýchlostiach, kedy však i s malým zaťažením prúd veľmi rýchlo vzrastie. Táto chyba by sa dala odstrániť použitím meracieho odporu s väčsím el. odporom, čím však vzrastú i straty, alebo výmenou OZ za typ s nižším prahovým napätím.
Odkazy & Download:
-
Oficiální stránky Freescale Semiconductor: http://www.freescale.com
-
HRABOVCOVÁ, V. – RAFAJDUS, P. – FRANKO, M. – HUDÁK, P.: Meranie a modelovanie elektrických strojov. EDIS -vydavateľstvo ŽU, apríl 2004.
-
HRABOVCOVÁ, V. – RAFAJDUS, P. – JANOUŠEK, L. – LIČKO, M.: Moderné elektrické stroje. EDIS -vydavateľstvo ŽU, apríl 2001.
-
KORÁB, R.: Unplug nebývajú iba speváci. Z časopisu Urob si sám, október 2006.
-
TÚMA, J.: Elektronáradie. Vydavateľstvo Colombus
-
FREESCALE SEMICONDUCTORS: „HCS08 Microcontrollers", Rev.1.01, Freescale 10/2005
-
LAJSNER, P.: Battery Powered Drive Control Application. Designer Reference Manual – Rev 0, Motorola Czech Systems Laboratories Roznov p.R.
-
SMITH, Steven W.: The Scientist and Engineer's Guide to Digital Signal Processing. Kapitola 15, www.dspguide.com
-
Průmyslové PID regulátory: Tutorial, www.rexcontrols.cz
-
Internetová stránka Ústavu výpočtovej a riadiacej techniky VŠCHT Praha, http://uprt.vscht.cz



