
Inerciální měřící jednotky IMU obsahují tříosé akcelerometry a tříosé gyroskopy, které pomohou určit daleko přesnější polohu zemědělských strojů. Tento článek pojednává o důležitosti a roli IMU v zemědělství a zabývá se potenciálními zdroji chyb při používání IMU a jejich eliminaci. Nakonec se zaměří na přesné IMU řešení od Honeywell Sensing a Productivity Solutions a Analog Devices.
Proč je sledování polohy v zemědělství důležité?
Orání, výsadba, zalévání, hnojení a sklizeň. To jsou činnosti, které se v zemědělství provádějí pořád dokola a ve na celých hektarech současně. Není brán ohled na složení půdy či odpařování vody. Při ručním řízení strojního zařízení (například traktoru) může dojít k vynechání části orby nebo zbytečnému přeorání. I když se to nezdá, tak na velkých plochách dochází ke zvýšení spotřeby paliva, prodloužení stráveného času a menší využití půdy (obrázek 1).

Obrázek 1: Tradiční zemědělství považuje celé pole za jednotné a používá ruční řízení. To vede ke ztrátě času a využití půdy. Použití IMU v zemědělství to může změnit. (Zdroj obrázku: John Deere®)
Přesná lokalizace přináší mnoho výhod. Detailní informace o vlastnostech půdy pro danou lokalitu na velkých plochách pomohou k výpočtu množství vody, hnojiv a pesticidů pro danou lokalitu. Tím se maximalizuje výnos. Přesné zemědělství změnilo způsob, jakým zemědělci obdělávají půdu. Příchod GPS navigace umožnil zemědělcům přesně zmapovat změny na polích a poskytnout jejich zemědělským strojům informace v reálném čase.
Kombinace podrobného mapování a přesných informací o poloze umožňuje zemědělcům aplikovat specifické úpravy vody, hnojiv a pesticidů pro dané místo. Tím se zvýší produkce, minimalizuje se odpad a sníží se dopad na životní prostředí. Pomocí GPS lze nasadit takové systémy, které poskytují poloautonomní řízení zemědělských strojů, a tím se sníží únava řidiče a umožní se účinný provoz i za nízké viditelnosti (prach, mlha, déšť a tma).
Nad rámec GPS
Ideální zemědělský lokalizační systém by byl takový, který by spolehlivě lokalizoval jednotlivou rostlinu nebo řádek plodin v poli. To znamená nabídnout přesnost v řádu několika centimetrů. Základní GPS přijímače poskytují přesnost pouze několik metrů. Dvoukanálové přijímače GPS nebo tzv. kinematické systémy v reálném čase (RTK), které zpětně vysílají signály GPS z pevných stanic, mohou dosáhnout přesnosti hluboko pod jeden metr. I tak se ale dostaneme na přesnost okolo 0,7 m. Mezi další komplikace týkající se lokalizace na základě GPS patří odrazy nebo blokování signálu okolními objekty a terénem.
Satelitní navigace neposkytuje žádné informace o orientaci či náklonu. To může v zemědělské aplikaci způsobit chyby polohy. Například traktor s podporou GPS může mít anténu na střeše kabiny řidiče. To je asi 3 metry nad zemí. Mylný je předpoklad, že z polohy GPS antény lze odvodit polohu připojeného vybavení. Problém je v tom, že systém GPS nemůže určit orientaci (náklon), kdy traktor projíždí svahem (obrázek 2). Skutečná poloha se při sklonu 5°může lišit až o 25 cm.
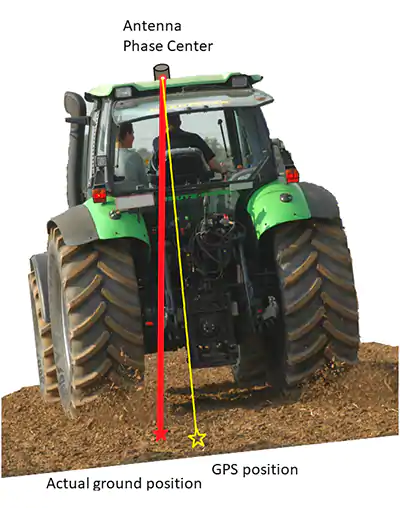
Obrázek 2: GPS nemůže určit orientaci (náklon), takže svahy mohou způsobit chyby při určování skutečné polohy zařízení. (Zdroj obrázku: Richard A Quinnell)
Jedním z řešení těchto problémů je doplnění GPS navigace o inerciální navigaci. Inerciální navigace vypočítává přesnou polohu díky akcelerometrům a gyroskopům. Měřením směru gravitačního tahu mohou inerciální senzory korigovat chyby náklonu při určování polohy pomocí GPS a zároveň pomohou zvýšit bezpečnost obsluhy varováním při překročení náklonu, kdy hrozí převrácení.
Akcelerometry měří změny lineárního pohybu podél tří ortogonálních os, a protože gravitační tah je zrychlení, může také odhalit jeho směr. Gyroskopy měří úhlový pohyb (tj. Rotaci) kolem každé ze stejných tří lineárních os. Dostáváme podrobné informace o poloze v šesti stupních volnosti (obrázek 3).
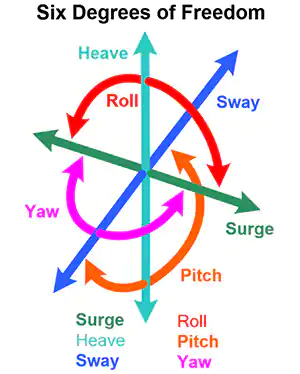
Obrázek 3: Inerciální navigace používá senzory k měření změn pohybu podél šesti stupňů volnosti - tři lineární a tři úhlové. (Zdroj obrázku: Honeywell Sensing and Productivity Solutions)
Jelikož akcelerometry měří zrychlení v ose, a proto musí být tyto hodnoty integrovány v čase, abychom získali rychlost a poté znovu integrovat, abychom získali dráhu. Gyroskopy zase měří úhel naklonění k dané ose. Tyto naměřené hodnoty se musí také integrovat, abychom získali daný úhle náklonu.
Náhodný šum, který vzniká při měření se eliminují díky integraci. Nicméně integrace však může znásobit chyby vznikající uvnitř akcelerometrů či gyroskopů. Pokud se tyto chyby neoprav mohou se nahromadit, a tím se značně sníží přesnost polohy objektu. Obecně platí, že čím menší je chyba v měření, tím kratší čas je nutný pro výpočet požadované přesnosti polohy.
Zdroje chyb v IMU
Bias error
Jedním z klíčových zdrojů chyb v inerciálních senzorech MEMS pro akcelerometry a gyroskopy je chyba „biasu“. Chyba „biasu“ je zbytkový signál, který senzor generuje při nulové rotaci nebo lineárního zrychlení. Tato chyba je deterministická, jedinečná pro každý senzor a je často také závislá na teplotě. Díky integraci tohoto signálu v čase může hodnota signálu rychle vystoupat na nepřijatelnou úroveň. Naštěstí je tato chyba vypočitatelná, a tak se dá lehce eliminovat správnou kalibrací.
Nestabilita biasu
S chybou biasu souvisí jeho nestabilita - náhodná změna chyby v čase. Tento zdroj chyby nelze vypočítat, takže je nutné posoudit, jak velká změna chyby se může tolerovat a vybrat senzor, který tomu vyhovuje.
Chyba měřítka:
Jedná se o deterministickou chybu. Chyba měřítka se také nazývá někdy citlivost a je nejvhodnějším ukazatelem kvality senzoru. Jelikož přímo udává vztah mezi vstupem a výstupem. Jedná se o odchylku výstupu od lineární závislosti obvykle vyjádřená v procentech. Tato chyba je závislá na teplotě, ale lze ji eliminovat správnou kalibrací.
Citlivost g
Jedná se o typickou vlastnost gyroskopu čili citlivost na gravitačním zrychlení ( g je gravitační zrychlení o hodnotě 9,8 m / s 2). Tato chyba lineárního zrychlení může nastat v gyroskopech MEMS v důsledku asymetrie v jejich konstrukci.
Gyroskop MEMS pracuje tak, že vibruje „zkušební hmotu“ v jednom směru, zatímco snímá jakýkoli pohyb v ortogonálním směru. Zatímco se snímač otáčí kolem osy kolmo k těmto dvěma jiným směrům, Coriolisův efekt má za následek detekovat pohyb zkušební hmoty do strany.
Lineární zrychlení senzoru kolmého na vibrace zkušební hmoty může také vyvolat boční pohyb v důsledku setrvačné hmotnosti zkušební hmoty. Citlivost gyroskopu na toto zrychlení je funkcí jeho konstrukční a výrobní přesnosti. Použití dat z nezávislého akcelerometru však umožňuje tuto chybu kompenzovat.
Chyba korekce vibrací (VRE)
Jedná se o další jedinečný zdroj chyby gyroskopu a nazývá se také chyba g na druhou. Je to odezva akcelerometru na střídavé vibrace, které se usměrňují na stejnosměrný proud. To se projevuje jako neobvyklý posun v offsetu akcelerometru. VRE může nastat prostřednictvím několika mechanismů a nelze ji kompenzovat v reálném čase, protože je vysoce závislé na specifikách dané aplikace. Je nutné posoudit, zda VRE daného senzoru se pohybuje přijatelných mezích pro danou aplikaci. Tuto chybu lze částečně eliminovat při montáži senzoru vhodným tlumením vibrací.
Citlivost napříč osami
Na úrovni systému se může taky vyskytovat zdroj chyby. Jednou takovou chybou je citlivost napříč osami. K tomu dochází, když se skutečná osa snímání odchýlí od zamýšleného směru. To má za následek příjem signálu z pohybů, který by snímač neměl detekovat. Například senzor, který je zamýšlen jako horizontální, může stále detekovat gravitační silu, pokud je špatně vycentrován. Vychýlení mezi osou akcelerometru a gyroskopu může ohrozit kompenzaci gyroskopické chyby citlivosti g.
Chyby mimo osu
Mechanika hraje roli při generování „mimoosých“ chyb v akcelerometru. Pokud bod nárazu do senzoru není soustředěn přímo na zkušební hmotu akcelerometru, může senzor zaznamenat další zrychlení v důsledku mírného otáčení, které zkušební hmota vytváří kolem linie nárazu.
Integrované jednotky IMU kompenzují senzorové chyby
Integrované jednotky IMU se šesti stupni volnosti značně zjednodušují implementaci do zařízení. Na trhu je inerciální jednotka ve formě modulu ADIS16465-3BMLZ od Analog Devices a HDFwell 6DF-1N6-C2-HWL od Honeywellu (obrázek 4). Stačí pouze připevnit na zemědělský stroj a připojit k systému.

Obrázek 4: Integrované IMU, jako je modul Honeywell 6DF-1N6-C2-HWL pomáhají zjednodušit návrh systému tím, že kompenzují senzorové chyby. K dispozici jsou také BGA IMU připojitelné přímo na desku. (Zdroj obrázku: Honeywell Sensing and Productivity Solutions)
K dispozici nejsou jenom moduly, ale také čipy v podobě ADIS16500 / 05/07 od Analog Devices. Tyto čipy jsou vhodné k integraci do přijímačů GPS, a tím vytvořit komplexní jednotku pro určení polohy.
ADIS16500 / 05/07 obsahuje tříosý akcelerometr s tříosým gyroskopem a teplotním senzorem, a to vše je integrováno do pouzdra BGA. Čip má integrovanou kalibraci, filtrování a další funkce, které pomáhají eliminovat zmíněné chyby IMU (obrázek 5).
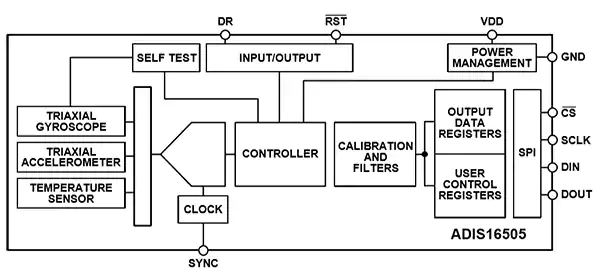
Obrázek 5: ADIS16505 má integrovány funkce (kalibrace, filtrování a jiné) pro eliminaci chyb. (Zdroj obrázku: Analog Devices)
ADIS16505 eliminuje chyby odchylky od osy na méně než 0,25°. Vestavěný teplotní senzor slouží ke kompenzaci chyb závislých a teplotě. Vnitřní signální řetězec těchto integrovaných IMU poskytuje další zmírnění chyb (obrázek 6). Surová data ze senzoru prochází nejprve digitálním filtrem, aby se odstranil šum, poté prochází uživatelem konfigurovatelným Bartlettovým filtrem. Bartlettovo okno je filtr s okamžitou odezvou (FIR) využívající dva kaskádové stupně.
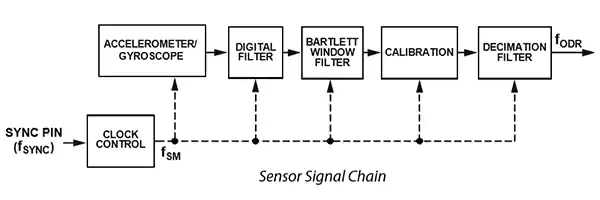
Obrázek 6: Celý řetězec funkcí, kterým prochází surová naměřená data, pomáhají eliminovat chyby senzoru použitím kalibračních parametrů stanovených výrobcem. (Zdroj obrázku: Analog Devices)
Signál dále prochází kalibrací, dle kompenzačních hodnot, které byly stanoveny při různých teplotách. Násobení matic na všech šesti vzorcích současně je tato fáze schopna kompenzovat chyby zkreslení, chyby měřítka a chyby biasu jak v akcelerometrech, tak v gyroskopech. Rovněž opravuje chyby lineárního zrychlení v gyroskopech a chyby posunutí os v akcelerometrech.
K dispozici je také uživatelsky nastavitelná korekce, která upravuje výstupy akcelerometru tak, aby se chovaly, jako by byly všechny umístěny ve stejném referenčním bodě. Po kalibračních korekcích signály procházejí druhým digitálním filtrem. Tento decimační filtr průměruje několik vzorků dohromady, aby se vytvořil konečný výstup. To poskytuje další redukci šumu. Počet průměrovaných vzorků v jednom okamžiku si lze zvolit.
Systémové úvahy
Jedním z mála zdrojů chyb, které integrovaná IMU nemůže opravit, je VRE. U zemědělských strojů jsou vibrace všude přítomné. Mnoho levných IMU má velmi špatné VRE. Zařízení určená pro prostředí s vysokými vibracemi musí mít VRE co nejnižší. Rodina ADIS16500 má VRE přibližně 4 x 10 -6 (° / s) / (m / s 2 ) 2. Tedy trvalá vibrace o hodnotě 1 g ( sila, která by odpálila řidiče ze sedadla) by vedla pouze k chybě rotace asi o jeden stupeň za hodinu.
Pokud je lokalizační systém používán k zajištění autonomního nebo poloautonomního řízení strojů, je třeba vzít v úvahu také bezpečnostní faktory. Senzory MEMS mohou být ohromeny příliš velkým nárazem, který může způsobit dočasné vypnutí senzoru nebo jeho výstup zůstane připnutý na maximum. Systém musí být navržen tak, aby takové krátkodobé otřesy nevedly k nebezpečným nebo nepříjemným chováním celého systému.
Dobrým způsobem, jak začít s inerciálním měřením je použít vývojovou desku EVAL-ADIS2Z od Analog Devices (obrázek 7). Tuto desku je snadné připevnit k zemědělskému stroji a okamžitě shromažďovat data o vibracích a pohybu stroje.

Obrázek 7: EVAL-ADIS2Z se jednoduše připojí na zemědělský stroj pro účely sběru dat. (Zdroj obrázku: Analog Devices)
Závěr
Přesné zemědělství založené na satelitní navigaci již poskytuje zemědělcům zvýšenou produktivitu.
Přidáním inerciálního měření polohy se zlepší přesnost určování polohy stroje. Vývoj inerciálního mření je složitý proces plny překážek, a tak existují hotové moduly a čipy, které mají integrovány speciální funkce pro eliminaci chyb.
Článek vyšel v originále na webu DigiKey.com, autorem je Richard A. Quinnell.



