Využití globálního navigačního satelitního systému GNSS, do kterého patří evropský systém Galileo, americký systém GPS, ruský GLONASS, čínský BeiDou a japonský QZSS, roste v celé řadě aplikací včetně robotiky, autonomních vozidel, průmyslové automatizace, logistiky a sledování aktiv, dronů či zemědělské a těžké stavební techniky. Mezi výhody používání multi-konstelačních přijímačů GNSS patří lepší dostupnost pozičních, navigačních, časovacích (PNT) signálů, vyšší přesnost a integrita a vylepšená robustnost aplikace.
Vývoj přijímačů výše uvedených systémů je složitý a časově náročný, jelikož obsahje:
- Optimalizaci antény v pásmu L
- Návrh radiofrekvenčního front endu
- Integraci algoritmů pro zpracování signálu v základním pásmu za účelem získání, sledování a opravy signálů PNT
- Software k extrakci dat PNT z každého kanálu základního pásma
- Výběr vhodné antény a její správné umístění
Tento článek se zabývá základy multi-konstelačních přijímačů GNSS. Poté upozorní na výhody a nevýhody integrace antén do modulů GNSS a pak představí vývojové desky od STMicroelectronics, Septentrio a Würth Elektronik, které lze využít ro vývoj přesných a robustních aplikací pro lokalizaci.
Jaký je rozdíl mez GNSS a PNT?
GNSS (Global Navigation Satellite System) a PNT (Positioning, Navigation and Timing) jsou úzce související pojmy. Satelity GNSS jsou nejběžnějším zdrojem signálů PNT. Satelity GNSS jsou v podstatě vysoce přesné synchronizované hodiny, které neustále vysílají signál PNT. Modul GNSS přijímá signály PNT z daného satelitu a vypočítává jeho vzdálenost od tohoto satelitu. Když přijímač zná vzdálenost alespoň čtyř satelitů, dokáže odhadnout svou vlastní polohu. Přesnost odhadu polohy je však ovlivněna řadou zdrojů chyb:
- Drift hodin časoměrných obvodů v satelitech GNSS
- Nepřesnosti v predikci přesné orbitální polohy satelitů GNSS
- Drift obecného výkonu v celkovém satelitním zařízení ve srovnání s jinými satelity, jinak známý jako satelitní zkreslení (satellite biases)
- Deformace a zpoždění přenosu signálu při průchodu ionosférou a troposférou.
- Odraz více cest, variabilní výkon a drift v přijímači
Existují různé techniky, jak opravit chyby GNSS vznikající přímo v satelitu nebo průchodem atmosféry.
Zlepšení výkonu GNSS
Nejlepší způsob, jak minimalizovat dopad chyb pocházejících z přijímače GNSS je použít přijímač s velkým výkonem. Ale ani vysoce výkonné přijímače nejsou dokonalé. Jejich výkon lze velmi pravděpodobně ještě vylepšit. Je důležité porozumět těmto korekčním metodám, protože některé metody nejsou vhodné jen pro některé moduly GNSS. Pozemní referenční stanice používají několik metod korekce GNSS (obrázek 1). Nejznámějšími metodami pro pozemních referenční stanice jsou Time Kinematic (RTK) a Precise Point Positioning (PPP). V poslední době jsou dostupné i hybridní metody RTK-PPP.
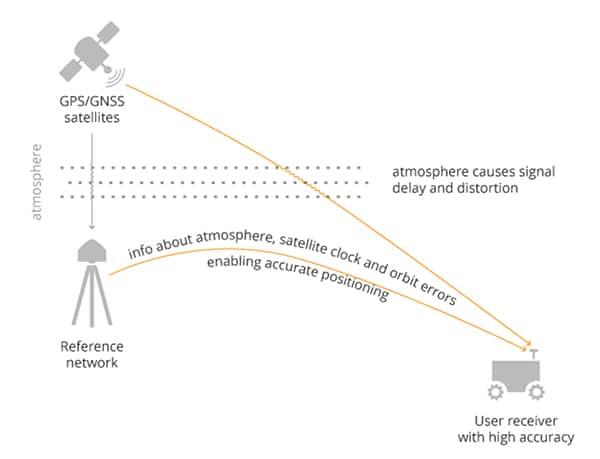
Obrázek 1: Uživatelský přijímač GNSS může získat informace o atmosféře, hodinách a chybách oběžné dráhy z referenční sítě a zlepšit tak přesnost určování polohy. (Zdroj obrázku: Septentrio)
RTK spoléhá na jedinou základnovou stanici nebo lokální referenční síť pro opravná data, která mohou eliminovat většinu chyb GNSS. RTK předpokládá, že základnová stanice a přijímač jsou blízko sebe, maximálně 40 km, takže dochází ke stejným chybám.
Post-Processed Kinematic neboli PPK je varianta RTK a je široce používána v geodézii a mapování pro získání vysoce přesných polohovacích dat s přesností na centimetry.
K provádění korekcí PPP se používají pouze chyby orbity a satelitu. Tyto chyby specifické pro satelit jsou nezávislé na poloze uživatele, a to omezuje počet potřebných referenčních stanic. PPP však nezohledňuje chyby související s atmosférou, a proto má nižší přesnost ve srovnání s RTK. Korekce PPP mohou mít navíc inicializační časy přibližně 20 minut. Delší doba inicializace a nižší přesnost činí PPP pro mnoho aplikací nepraktickým.
Aplikace vyžadující přesnost blízkou RTK a rychlé časy inicializace často využívají nejnovější korekční službu a to RTK-PPP (někdy označovanou jako state-space representation SSR). RTK-PPP využívá referenční síť se stanicemi vzdálenými od sebe asi 100 km, která shromažďuje data GNSS a vypočítává kombinaci satelitních a atmosférických korekcí. Referenční síť používá internetové, satelitní nebo mobilní telefonní sítě k odesílání opravných údajů. Přijímače GNSS používající RTK-PPP mohou mít přesnost pod jeden decimetr. Volba použití korekčních metod RTK, PPP a RTK-PPP zahrnuje řadu konstrukčních kompromisů, které musí být během vývoje přezkoumány, aby bylo vybráno optimální řešení pro konkrétní profil aplikace. (Obrázek 2).

Obrázek 2: Silné a slabé stránky tří běžných metod korekce GNSS. (Zdroj obrázku: Septentrio)
Satelitní augmentační systémy (Satellite-based augmentation systems - SBAS) začínají být dostupné na regionální bázi, aby nahradily korekční metody založené na pozemních stanicích RTK, PPP a RTK-PPP. SBAS stále používá pozemní stanice k měření chyb GNSS, ale stanice jsou rozmístěny po kontinentech. Naměřené chyby jsou zpracovány na centrálním místě, kde jsou vypočítány korekce a přeneseny na geosynchronní satelity nad pokrytou oblastí. Korekční data jsou vysílána ze satelitů jako překrytí nebo rozšíření původních dat GNSS.
Přesnost GNSS je závislá na dostupnosti a přesnosti družicových měření a souvisejících korekcí. Vysoce výkonné GNSS přijímače sledují signály GNSS na více frekvencích a využívají více konstelací GNSS a různé metody korekce, aby zajistily potřebnou přesnost a odolnost. Výsledná redundance poskytuje stabilní výkon, i když některá satelitní měření a data jsou zarušena. Lze si vybrat z různých možností přesnosti a redundance GNSS (obrázek 3).
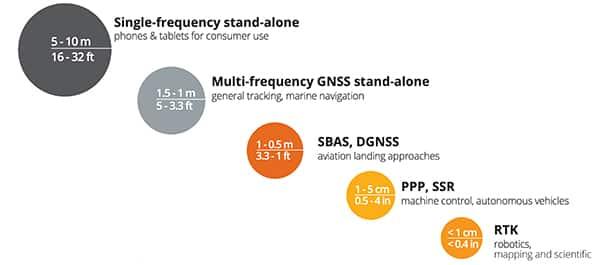
Obrázek 3: Stupně přesnosti GNSS s odpovídajícími korekčními metodami a vybranými aplikacemi. (Zdroj obrázku: Septentrio)
GNSS moduly: integrované vs externí antény
Vzhledem ke složitosti implementace zpravování GNSS signálu jsou k dispozici moduly od různých dodavatelů, které pomáhají urychlit dobu uvedení na trh, snížit náklady a zajistit dostatečný výkon a spolehlivost.
To znamená, že konstruktéři musí zvážit, zda použít interní anténu nebo zvolit anténu, která bude umístěna mimo modul GNSS. Pro aplikace, kde je prioritou čas uvedení na trh a cena, může být výhodnější integrovaná anténa, protože vyžaduje podstatně méně ladění. U aplikací, které vyžadují certifikaci FCC nebo CE, může použití modulu s integrovanou anténou také urychlit schvalovací proces. Velikost řešení se však může zvětšit a flexibilita může být u integrovaných anténních řešení omezená.
Externí antény poskytují konstruktérům širší škálu možností výkonu a rozložení. Lze zvolit velkou výkonnou anténu nebo menší a méně výkonnou anténu. Umístění antény je navíc flexibilnější vzhledem k umístění modulu GNSS. Flexibilita také umožňuje externím anténám poskytovat spolehlivější provoz GNSS. Umístění antény a směrování připojení však může být složitý a časově náročný proces a vyžaduje specifické odborné znalosti, a to potenciálně zvyšuje náklady a zpomaluje dobu uvedení na trh.
Malý GNSS modul pro prostorově omezené produkty
GNSS modlul Teseo-LIV3F od STMicroelectronics podporuje GPS/Galileo/GLONASS/BeiDou/QZSS a využívá externí anténu (obrázek 4). Modul je dodáván v pouzdru LCC-18 o rozměrech 9,7 mm x 10,1 mm a nabízí přesnost polohy 1,5m (CEP- circular error probable). TTFF (time to first fix) pro studený start je 32 s a 1,5 s pro teplý start. Spotřeba energie v pohotovostním režimu se pohybuje okolo 17 µW a spotřeba energie pro sledování je 75 mW.
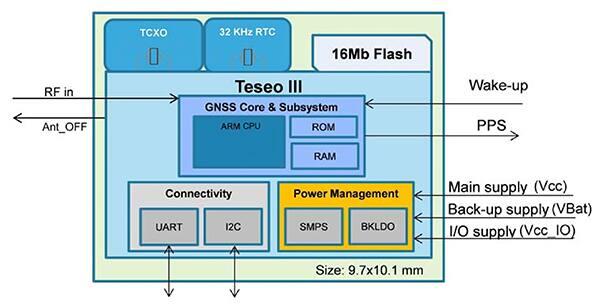
Obrázek 4: GNSS modul Tesco-LIV3F obsahuje jádro a subsystémy GNSS plus veškerou požadovanou konektivitu a správu napájení v pouzdře o rozměrech 9,7 x 10,1 mm. Vyžaduje externí anténu. (Zdroj obrázku, STMicroelectronics)
Tesco-LIV3F má integrovaný 26 MHz teplotně kompenzovaný krystalový oscilátor TCXO s vysokou přesností a vyhrazený oscilátor hodin reálného času RTC s frekvencí 32 kHz. Funkce typu logování dat, sedmidenní autonomní asistované GNSS, rekonfigurovatelnost firmwaru (FW), stejně jako upgrady FW jsou umožněny díky vestavěné 16 Mbit Flash paměti. Tesco-LIV3F je vhodný pro aplikace typu logistika, drony, mýtné systémy, systémy proti krádeži, lokalizaci osob a domácích mazlíčků, sledování vozidel a tísňová volání. Tesco-LIV3F je předem certifikované řešení, které vede ke zkrácení doby uvedení finální aplikace na trh. Navíc je schopen pracovat v teplotách od -40°C do +85°C.
K experimentování s modulem a urychlení vývoje lze použít vývojovou desku AEK-COM-GNSST31. K dispozici je firmware X-CUBE-GNSS1, který umožňuje veškeré operace pro lokalizaci včetně navigace a ukládání dat do externí paměti. Tato vývojová deska je také navržena pro použití s mikrokontrolerem SPC5 pro vývoj automobilových aplikací.
GNSS modul se zvýšenou odolností vůči rušení
GNSS přijímač Septentrio 410322 mosaic-X5 je nízkoenergetický modul pro povrchovou montáž o rozměrech 31 mm x 31 mm x 4 mm, který poskytuje řadu rozhraní, včetně čtyř UART portů, Ethernetu, USB, SDIO a dvou uživatelsky programovatelných GPIO.
Mozaika-X5 je navržen pro použití v robotice a autonomních systémech a nabízí rychlost aktualizace 100 Hz, latenci pod 10 ms a vertikální a horizontální přesnost RTK 0,6 cm až 1 cm. Může sledovat všechny konstelace GNSS a je kompatibilní s opravami PPP, SSR, RTK a SBAS. TTFF modulu je pod 45 s studený start a pod 20 s teplý start.
Mosaic-X5 obsahuje několik patentovaných technologií Septentrio, včetně AIM+a integrované technologie pro zmírnění dopadu rušení. Rozhraní, příkazy a datové zprávy modulů jsou detailně zdokumentovány. Přiložený software RxTools umožňuje konfiguraci a monitorování přijímače, stejně jako logování a analýzu dat. Vývojová sada 410331P3161 od Septentrio umožňuje zkoumat, hodnotit a vyvíjet prototypy, které plně využívají vlastnosti mozaiky-X5 (obrázek 5).

Obrázek 5: Návrháři mohou vytvořit prototyp pomocí vývojové sady 410331P3161 mosaic-X5 pomocí různých připojení, včetně Ethernetu, portů COM nebo USB 2.0, nebo pomocí paměťové karty SD. (Zdroj obrázku: Septentrio)
Sada využívá intuitivní webové uživatelské rozhraní mosaic-X5 pro snadné ovládání a monitorování, a to umožňuje ovládat modul přijímače z jakéhokoli mobilního zařízení nebo počítače. Webové rozhraní využívá snadno čitelné indikátory kvality pro sledování provozu přijímače.
GNSS modul s integrovanou anténou
Modul 2614011037000 Erinome-I od Würth Elektronik s vysoce výkonným SoC (obrázek 6) podporuje GPS, GLONASS, Galileo a BeiDou a je dodáván s integrovanou anténou, která zjednodušuje integraci hardwaru a zkracuje dobu uvedení na trh. Modul včetně integrované antény měří pouhých 18 mm x 18 mm.
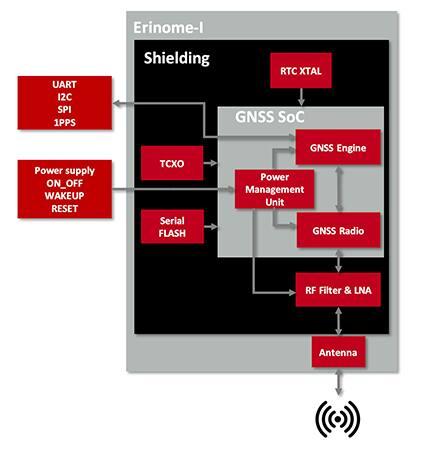
Obrázek 6: 2614011037000 Erinome-I je kompletní GNSS modul s vysoce výkonným GNSS SoC a integrovanou anténou. (Zdroj obrázku: Würth Elektronik)
Součástí modulu je také TCXO, RF filtr, nízkošumový zesilovač (LNA) a sériová flash paměť. Würth také nabízí vývojovou desku 2614019037001 (EVB) pro Erinome-I (obrázek 7). Vývojová deska může sloužit jako referenční návrh pro integraci modulu GNSS do aplikace. Pro připojení vývojové desky k PC lze použít USB port. Vícekolíkový konektor umožňuje návrhářům přístup ke všem pinům modulu GNSS.
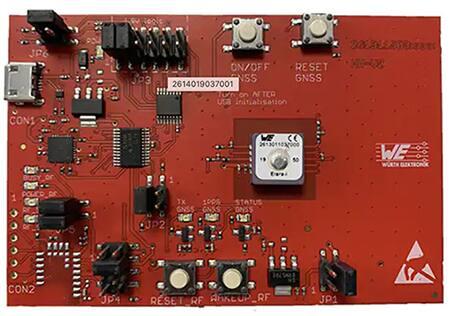
Obrázek 7: Vývojová deska deska 2614019037001 pro Erinome-I (poblíž středu desky a s integrovanou anténou viditelnou ve středu modulu) také funguje jako referenční návrh. (Zdroj obrázku: Würth Elektronik)
Navigační a satelitní software Würth Elektronik (WENSS) je jednoduchý nástroj pro interakci s modulem Erinome-I GNSS pomocí rozhraní UART. Podporuje:
- Řízení provozu vývojové desky
- Obousměrnou komunikaci s modulem Erinome-I
- Zkoumání funkcí a schopností Erinome-I
- Seznámení se s protokoly a příkazy Erinome-I
- Konfiguraci Erinome-I bez znalosti protokolů
- Analýzu příkazů používaných Erinome-I
WENSS umožňuje snadné vyhodnocování lokalizačních aplikací bez pokročilých znalostí. Zkušení vývojáři mohou také použít WENSS pro pokročilejší konfigurace.
Závěr
Přesnou a spolehlivou lokalizaci lze nejlépe dosáhnout pomocí modulů GNSS s přidruženou podporou korekční technologie. Související vývojové sady a prostředí pomohou rychle a efektivně porovnávat možnosti a urychlit výběr daného modulu pro konkrétní aplikaci.
Další odkazy k této problematice:
- Use IMUs for Precise Location Data When GPS Won’t Suffice
- IMUs for Precise Location: Part 2 – How to Use IMU Software for Greater Precision
Článek vyšel v originále na webu DigiKey.com, autorem je Jeff Shepard.



