V článku se dozvíme o výhodách GAN výkonových stupňů a představíme si výkonové poloviční můstky od EPC. Představíme si vývojové sady motorBench Development Suite od Microchip Technology a dozvíme se jaké parametry BLCD motoru jsou důležité a co budeme potřebovat pro jeho řízení pomocí FOC .
Výhody technologie GaN
K efektivnímu řízení BLDC motoru v bateriových aplikacích je nutné použít efektivní, lehký driver malých rozměrů, který lze implementovat co nejblíže k pohonu. Například přímo uvnitř krytu motoru. IGBT tranzistory jsou robustní a mohou spínat vysoký výkon až 100 MW při maximálním kmitočtu 200 kHz. Nejsou ale vhodné pro zařízení s nabíjením baterie do 80 V. Vysoký přechodový odpor, flyback dioda a relativně vysoké spínací ztráty vedou ke zkreslení signálu, nadměrné tvorbě tepla a rušení.
MOSFET tranzistory sice spínají rychleji a mají nižší spínací i ohmické ztráty ve srovnání s IGBT, ale jejich hradlová kapacita vyžaduje výkonný hradlový budič, aby fungoval při vysokých spínacích frekvencích. Schopnost pracovat na vysokých frekvencích znamená, že lze používat menší elektronické součástky, a tím dosáhnout velmi malých rozměrů.
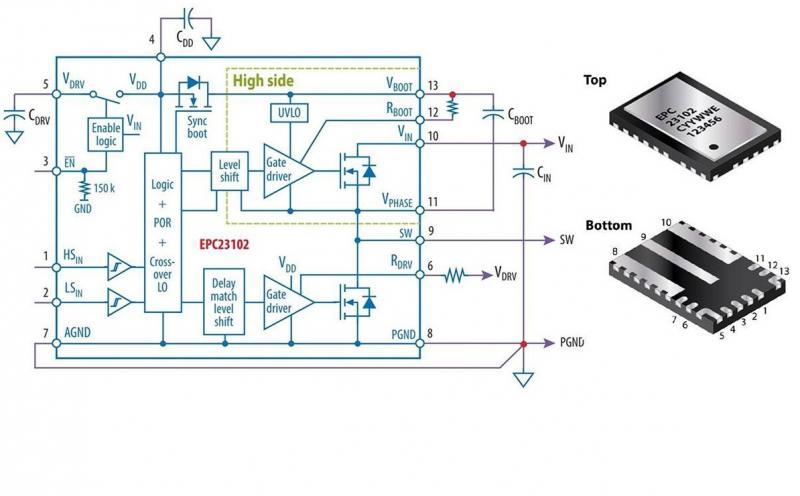
GaN tranzistory s vysokou elektronovou pohyblivostí (HEMT - high-electron-mobility transistors) jsou schopny spínat extrémně vysokou rychlostí s nízkými ztrátami. Integrovaný driver GaN EPC23102ENGRT od EPC se vyznačuje výjimečně nízkými spínacími ztrátami a vysokými spínacími frekvencemi. Monolitický čip obsahuje vstupní logické rozhraní s možností konverze logické úrovně napětí (logic level shifter), bootstrap loader a gate driver, který řídí výstupní GaN FETy zapojené jako poloviční můstek (obrázek 1). Pouzdro je navrženo tak, aby dosáhlo vysokého odvodu tepla a nízké parazitní indukčnosti.
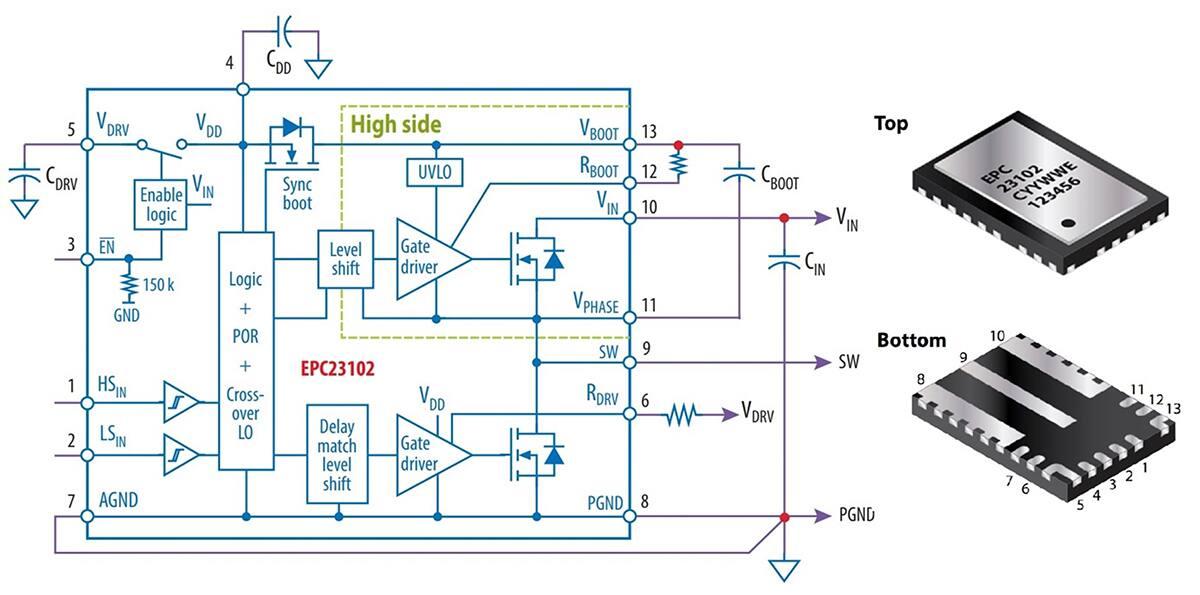
Obrázek 1: EPC23102 obsahuje řídicí logiku, logic level shifter, hradlové drivery a výstupní GaN FETy v zapojené jako poloviční můstek (vlevo). Pouzdro čipu (vpravo) dosahuje snadného odvodu tepla a nízké parazitní indukčnosti. (Zdroj obrázku: EPC)
Méně odpadního tepla a nižší EMR
Výstupní tranzistory EPC23102 mají odpor v zapnutém stavu RDS(on) roven 5,2mΩ při 25 °C. Zvládají napětí do 100 V a proudy do 35 A. Struktura GaN a absence vnitřní diody (intrinsic body diode) poskytují výjimečně nízký hradlový náboj QG a reverzní obnovovací náboj QRR. Ve srovnání s MOSFET tranzistorem s podobným odporem RDS(on) dosahuje driver GaN až pětkrát nižších spínacích ztrát. To umožňuje měniči na bázi GaN pracovat při relativně vysokých frekvencích PWM až 3 MHz a kratším tzv. deadtimem (mrtvým časem) pod 50 ns.
Díky vysoké spínací rychlosti (dV/dt) a nízkému teplotnímu koeficientu v pouzdru se sníženou parazitní indukčností nedochází ke zkreslení signálu, a tím se minimalizuje elektromagnetické rušení a spínací ztráty jsou také minimální. To vše snižuje nároky na filtr, a díky tomu je možné použít menší a levnější kondenzátory a induktory, čímž se ušetří místo na desce. Nízký přechodový odporem RDS(on), vysoká tepelná vodivost substrátu GaN a velká plocha tepelného kontaktu pouzdra umožňují výkonovým stupňům GaN spínat proudy až do výše 15 A bez použití chladiče (obrázek 2).
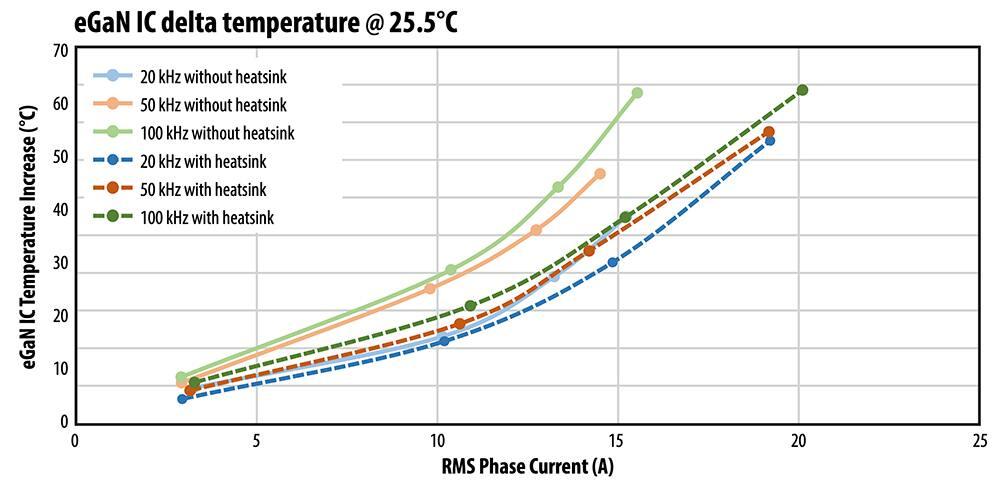
Obrázek 2: Nárůst teploty versus fázový proud pro výkonový stupeň GaN s okolní teplotou 25,5 °C a při různých frekvencích PWM. (Zdroj obrázku: EPC)
EPC23102 je vybaven robustními převodníky logických úrovní, které spolehlivě fungují i při velkém záporném svorkovém napětí. Ochranné funkce zabraňují nechtěnému zapnutí výstupních FET, když je napájecí napětí příliš nízké nebo se dokonce odpojí.
Vývojová sada s motorovým driverem
Nejjednodušší a nejrychlejší způsob, jak uvést do provozu třífázový BLDC motor s technologií GaN, je použít vývojovou sadu EPC9176KIT. Skládá se z výkonového stupně driveru motoru EPC9176 a řídicí desky EPC9147E, který slouží k připojení hostitelského mikrokontroleru. Propojovací konektor obsahuje následující signály: 3 × PWM, 2 × enkodér, 3 × Ufáze, 3 × Ifáze, UDC, IDC a 2 × stavová LED.
Vývojová sada EPC9176 může sloužit jako referenční design pro tvorbu vlastních obvodů a řídicí deska EPC9147A s vývojovým prostředím motorBench od Microchip Technology umožňuje rychle uvést desku do provozu, a to bez času stráveným programováním. Výkonový stupeň driveru EPC9176 obsahuje tři GaN poloviční můstky EPC23102 pro ovládání AC / DC motorů a DC/DC napájecích měničů. S odporem RDS(on) o hodnotě maximálně 6,6 mΩ způsobuje výkonový stupeň malé tepelné ztráty při zátěžových proudech do 28 Apeak nebo 20 ARMS při spínacích napětích do 100 V. V případě použití jako DC/DC měnič je EPC23102 schopen dosáhnout PWM spínací frekvence až 500 kHz. Pro řízení motorů to je 250 kHz.
Výkonový stupeň driveru EPC9176 o rozměrech 8,1 × 7,5 cm obsahuje všechny potřebné funkční obvody nezbytné pro řízení motoru, včetně kondenzátorů, hradlové budiče, regulovaných pomocných napětí, fázového napětí, fázového proudu, měření teploty, ochranné funkce a EMR filtry pro každou fázi (obrázek 3).
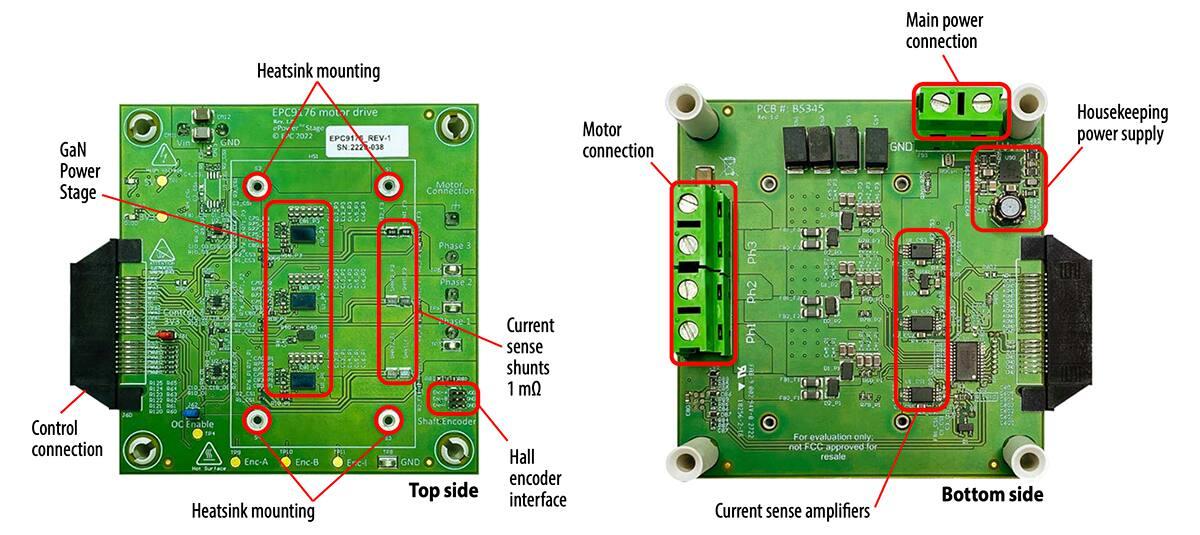
Obrázek 3: Výkonový stupeň EPC9176 obsahuje kondenzátory, hradlové budiče, regulátory napětí, snímače napětí, proudové a teplotní ochranné funkce a EMR filtry. (Zdroj obrázku: EPC)
GaN výkonový stupeň pracuje se vstupním napětím od 14 do 65 VDC. Spíná bez překmitu a výsledkem je plynulý točivý moment a minimální hlučnost. Deska je optimalizována pro technologii GaN s typickou vysokorychlostní spínací strmostí pod 10 V/ns, ale může být upravena pro provoz s DC/DC měničem. Navíc lze připojit dva snímače polohy rotoru (Hallovy snímače) pracující na různých úrovních napětí.
Točivý moment bez vibrací a s nízkým rušením
Pomocí vývojové sady si lze ověřit vliv velikosti tzv. mrtvého času na hladký chod motoru, ale i na velikost rušení. Mrtvý čas při přechodu FET na vysoké a nízké straně polovičního můstku založeného na technologii GaN může být zvolen velmi malý, protože GaN HEMT reagují extrémně rychle a nevytvářejí parazitní překmity ve srovnání s pomalejšími MOSFETy.
Obrázek 4 (vlevo) ukazuje GaN pracující s typickým mrtvým časem pro MOSFET, tedy 500 ns při frekvenci PWM 40 kHz. Zde je vidět extrémně vysoké zkreslení, které má za následek vysoké zvlnění točivého momentu a k tomu odpovídající šum. Na obrázku 4 (vpravo) je mrtvý čas snížen na 50 ns, a tím se dosáhne hladký sinusový fázový proud s velmi malým zkreslením.
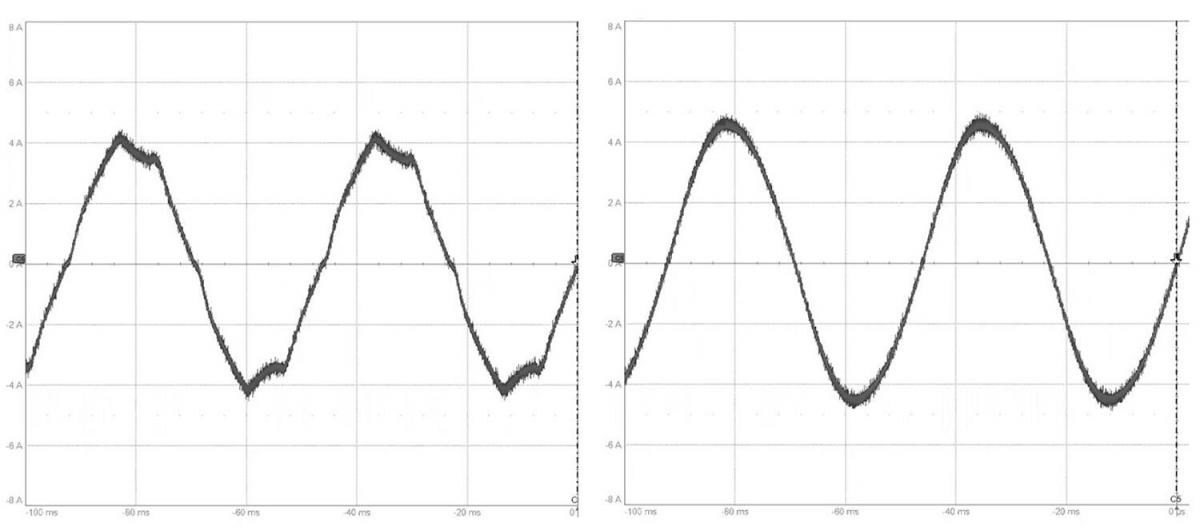
Obrázek 4: Mrtvý čas 500 ns při frekvenci 40 kHz PWM (vlevo) typická pro MOSFETy, způsobuje vysoké zkreslení fázového proudu, které má za následek vysoké zvlnění točivého momentu a vysoké hladiny šumu. S mrtvým časem 50 ns (vpravo) je vidět hladký průběh sinusového fázového proudu, takže se motor otáčí hladce s nízkým šumem a hlučností. (Zdroj obrázku: EPC)
Menší zvlnění fázového proudu znamená také nižší magnetizační ztráty ve statorových cívkách. Menší zvlnění fázového napětí umožňuje vyšší rozlišení, a to znamená přesnější řízení točivého momentu a otáček zejména u motorů s nízkou indukčností používaných v menších konstrukcích.
Pro aplikace, které vyžadují větší výkon jsou k dispozici dvě výkonové desky GaN: EPC9167HCKIT (1 kW) a EPC9167KIT (500 wattů). Obě používají EPC2065 GaN FET, který má maximální odpor RDS(on) 3,6 mΩ a je určen pro napětí maximálně 80 V. Zatímco deska EPC9167 používá jeden FET, EPC9167HC má dva FETy pracující paralelně a dohromady jsou schopny pracovat s proudem až 42 Apeak a 30 A RMS. EPC2065 GaN FET podporuje PWM spínací frekvence až do 250 kHz v aplikacích pro řízení motoru a maximálně 500 kHz v DC/DC měničích. Stejně jako u výše zmíněného výkonového stupně EPC9176.
Ještě vyšší výkon, a to až 1,5 kW, poskytuje deska v EPC9173KIT. Tato deska tvoří polomůstkové větve dvou samostatných integrovaných obvodů EPC23101ENGRT s hradlovým budičem GaN, které mají pouze jeden integrovaný FET na vysoké straně můstku. Tato deska může být nastavena jako buck, boost, half-bridge, full-bridge nebo LLC převodník. Je schopna dodávat výstupní proudy až 50 Apeak a 35 ARMS a pracuje při spínacích frekvencích PWM až do hodnoty 250 kHz s vhodným chlazením.
Uvedení desky do provozu během několika minut
Nejrychlejším způsobem, jak desku EPC9176 GaN uvést do provozu bez nutnosti programování, je použít řídící jednotku EPC9147A. Zásuvný modul (PIM- Plug-in module) MA330031-2 obsahuje 16bitový DSP dsPIC33EP256MC506-I-PT od Microchip Technology (obrázek 5).
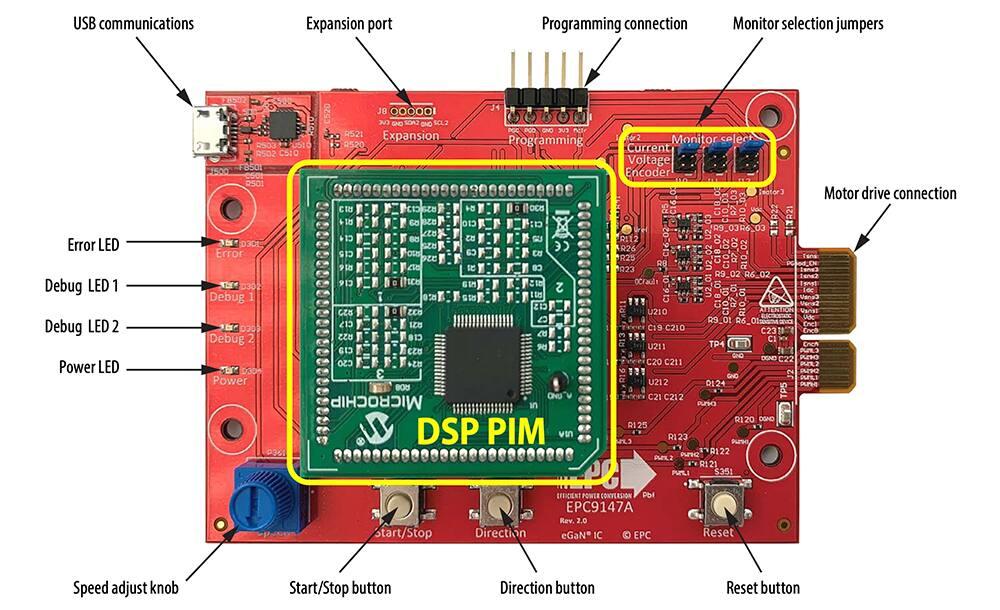
Obrázek 5: K řídící desce EPC9147A lze připojit různé zásuvné moduly (PIM) například MA330031-2 PIM, který je založen na 16bitovém dsPIC33EP256 DSP. (Zdroj obrázku: EPC/Microchip Technology)
Pro rychlé uvedení do provozu je vhodné využít motorBench Development Suite, ke kterému se musí přidat:
- MPLAB X IDE_V5.45 a doporučené aktualizace
- Plugin pro konfigurátor kódu(specifická kompilace DSP)
- motorBench plugin 2.35 (příklady motorů)
- Pro příklad uvedený v článku, kde je použit EPC9146 GaN, zvolíme projekt CLV-2 nebo EPC pro EPC914xKIT s názvem „sample-mb-33ep256mc506-mclv2.X“
Nyní si lze jednoduše vybrat vzorový hex soubor pro desku EPC9146 GaN a nahrát jej přímo do DSP dsPIC33EP256MC506 pomocí programovacího adaptéru PG164100 od Microchip Technology pro 16bitové mikrokontrolery. Připojený BLDC motor Teknic_M-3411P-LN-08D je pak manuálně ovladatelný pomocí ovladačů a pracuje v tzv. bezsenzorovém režimu FOC.
Pokud motor neběží jak jsme si přáli nebo je potřeba jej nakonfigurovat pro jiný provozní stav, motorBench poskytuje konfigurovatelný vzorový soubor, který je nutné před nahráním zkompilovat. Mějme na paměti, že důležitým parametrem pro technologii GaN je mrtvý čas 50 ns nebo méně. Tuto hodnotu je nutné zkontrolovat ještě před kompilací hex souboru.
Uživatelské parametry pro BLDC motor
Aby bylo možné nakonfigurovat vlastní konfiguraci motoru BLDC pro bezsenzorový provoz FOC pomocí IDE motorBench, je nutné změnit specifické parametry motoru v konfiguračním souboru. Jako testovací motor může sloužit například motor MOT-I-81542-A od ISL Products International. Jeho spotřeba je přibližně 360 W při 24 V s maximálními otáčkami 6100 rpm.
Nejprve je nutné určit tyto čtyři parametry motoru:
- Ohmický odpor: Měřený se mezi svorkami cívky statoru pomocí multimetru
- Indukčnost: Měřená mezi vývody cívky statoru pomocí multimetru
- Pólové páry: Pro určení pólových párů se musí zkratovat dvě fáze, třetí nechat nepřipojenou a poté ručně otáčet hřídelí a spočítat počet „cuknutí (Latch)“ při jedné otáčce hřídele. Poté výsledek vydělit dvěma
- Zpětná elektromotorická síla (BEMF) - BEMF se měří mezi vývody statorové cívky pomocí osciloskopu. K tomu je nutné připojit sondu ke dvěma fázovým vodičům, třetí nechat otevřený a rukou otáčet hřídelí motoru a zaznamenejte odezvu napětí. Změřit vrcholové napětí App a periodu Thalf největší sinusové půlvlny (obrázek 6).
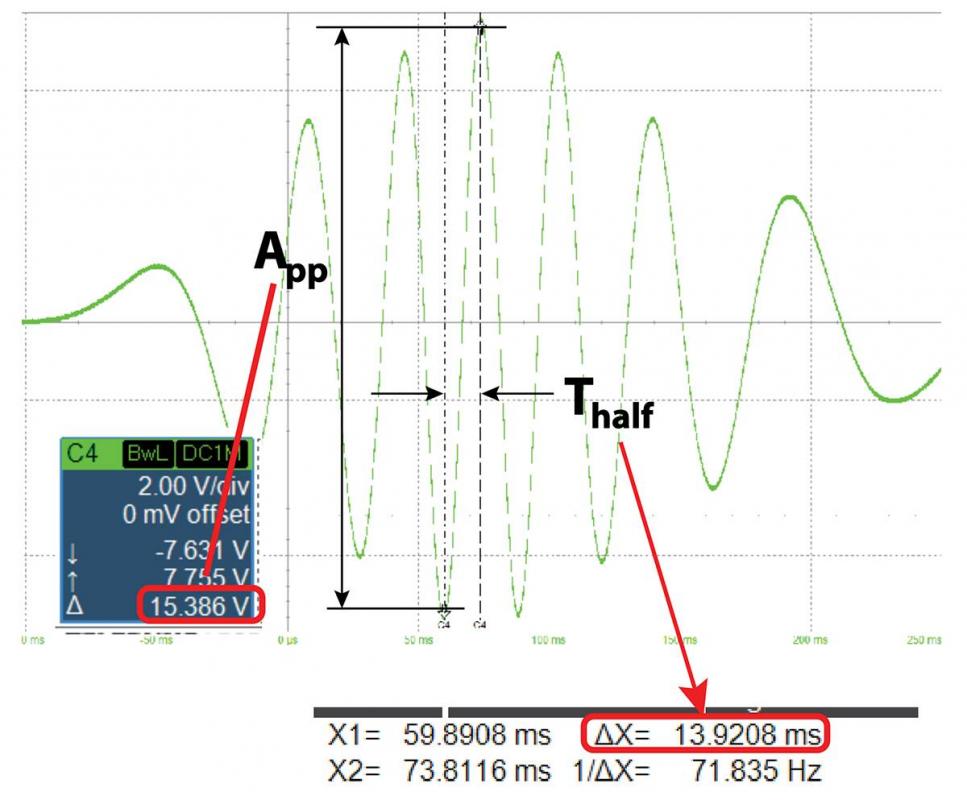
Obrázek 6: BEMF se určuje měřením špičkového napětí Apeak a periody Thalf největší sinusové půlvlny. (Zdroj obrázku: EPC)
Microchip určil následující parametry pro motor Teknic M-3411P-LN-08D (8,4 ARMS, osm pólů, točivý moment = 1 Nm a jmenovitý výkon 244 W):
- Apeak = 15,836 Vpp
- Thalf = 13,92 ms
- Dvojice pólů: pp = 4
- Microchip poté vypočítal konstantu BEMF (pro 1000 ot/min) pomocí rovnice 1:
Rovnice 1: 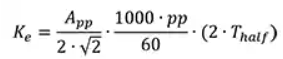
Čili po dosazení hodnot:

Pro náš typ motoru použijeme hodnotu 10,1 do software motorBench. Dále jsme změřili RL-L odpor mezi linkami 800 mΩ mínus 100 mΩ kabely LCR měřiče a indukčnost Ld = Lq = 1 mH, jelikož jsme naměřili 932µH.
Zjištěné parametry se zadávají do submenu motorBench Configure/PMSM Motor. Lze použít konfigurační soubor XML podobného typu motoru a změnit jej nebo zadat tyto parametry do nově vytvořeného (prázdného) konfiguračního souboru, který pak importovat pomocí tlačítka „Import motor“.
Závěr
Díky GaN technologii lze vytvořit výkonný driver, který bude velmi malých rozměrů a lze ho implementovat přímo do krytu BLCD motoru. Díky tomu je driver dobře chráněn, a tím se sníží nároky na údržbu. K dispozici je referenční deska driveru včetně výkonového stupně a jednoduchého připojení k řídící desce. Díky tomu se lze seznámit s výhodami GaN technologie pro řízení BLCD motorů a získat tak plynulé a přesné řízení bez rušení.
Článek vyšel v originále na webu DigiKey.com



