Abychom z nich ale vytěžili maximum, je zapotřebí se hlouběji zabývat dvěma stěžejními parametry, které definují jejich vlastnosti – přesností a rozlišením. I když se tyto termíny často zaměňují, budou v jakémkoli měřicím systému představovat odlišné věci, byť spolu jinak souvisejí. Článek má za cíl oba parametry více osvětlit. Vysvětluje, jak ovlivňují vlastnosti magnetických senzorů polohy a poskytuje vodítko při jejich optimalizaci.
Jak správně chápat přesnost a rozlišení
V oblasti měření a přístrojové techniky se bude přesnost vztahovat k „blízkosti“ měřené hodnoty zkoumané veličiny vůči té skutečné nebo opravdové. V případě magnetických snímačů polohy bude přesnost mírou toho, jak precizně odráží měření úhlu skutečnou situaci. Přesnost je způsob, díky kterému pochopíme, jak dalece koresponduje čtená pozice se skutečnou, přičemž vysoce přesné čidlo zajišťuje výstupy, které se od pravé úrovně liší pouze nepatrně.
Rozlišení naproti tomu v případě měřené veličiny signalizuje nejmenší změnu, kterou dokáže senzor detekovat. U magnetických snímačů pozice je rozlišení nejmenší změna úhlu, kterou lze s čidlem zaznamenat. Rozlišení je v podstatě mírou citlivosti senzoru vůči nepatrným změnám polohy. Snímače s vysokým rozlišením umí detekovat i ty nejmenší změny pozice a zajišťují tak podrobné detailní výstupy.
Zásadní rozdíl spočívá v tom, že vysoké rozlišení neznamená automaticky vysokou přesnost. Senzor je kupříkladu vysoce citlivý vůči nepatrným změnám, takže má vysoké rozlišení, ovšem i to může být stále málo a nepřesné, pokud se čtené hodnoty trvale odklánějí od skutečnosti. Čidlo může být rovněž vysoce přesné a důsledně zajišťovat měření v těsné blízkosti skutečné úrovně, ale je stiženo malým rozlišením, takže nedokáže zachytit drobné odchylky polohy. A právě takový paradox stojí za spletitým návrhem a také implementací magnetických senzorů polohy. Vývojáři proto musí najít rovnováhu mezi rozlišením a přesností, takže s ohledem na konkrétní potřeby dané aplikace docílí optimálních vlastností.
Nejlepší vlastnosti senzoru znamenají kompromisy
Aby vývojáři maximalizovali výkonnost systému magnetického snímače polohy, musí mít jasno v tom, jak přesnost a také rozlišení vyčíslit. A co víc, musí chápat, které parametry systému lze za účelem zvýšení přesnosti či rozlišení „vypilovat“, včetně způsobu, jakým je výrobci uvádí v dokumentaci. Každé zlepšení či zdokonalení však něco stojí a navyšování přesnosti nebo rozlišení zde nebude žádnou výjimkou. Správně oba parametry mezi sebou vyvážit ale vyžaduje pečlivé zvážení různých kompromisů.
Na cestě k lepšímu rozlišení je důležité minimalizovat šum. Abychom snížili rušení, a zvýšili tím rozlišení, lze použít okénkový filtr s průměrováním výstupu. Zmíněný filtr pracuje tak, že při čtení výstupu ze snímače vyhlazuje náhodné výkyvy a pomůže tím zajistit stabilnější a přesnější výsledky. Když ale filtr s funkcí průměrování zvyšuje rozlišení, snižujeme tím dynamickou šířku pásma. Reakce systému na akcelerace budou proto zpožděny úměrně omezení v šířce pásma. Bude-li nastavené okénko u filtru příliš široké, může to vést ke špatné skokové odezvě a nestabilitě ve smyčce servo řízení, což negativně ovlivňuje vlastnosti systému. Základní empirické pravidlo pro magnetické senzory natočení, založené na Hallově jevu, říká, že pro rozlišení a dalšího půl bitu navíc se dynamická šířka pásma bude půlit.
Lepší přesnosti, nebo též snížení integrální nelinearity (INL), lze na druhou stranu dosáhnout díky kalibraci. Kalibrace výstupu senzoru poté, co byl v dané aplikaci zapojen, může pomoci při potlačení vlivu mechanických tolerancí a jejich vrstvení, stejně jako nedokonalostí magnetu, takže nám zůstane pouze teplotní drift coby primární přispěvatel, pokud jde o INL. Kompromisem zde ale bude cena. Kalibrace totiž vyžaduje čas, prostředky a speciální znalosti, které se promítají do zvýšených nákladů na výrobu. A právě z tohoto důvodu nemusí kalibrace dávat smysl u všech aplikací, zvláště pak u těch, které jsou velmi citlivé na cenu.
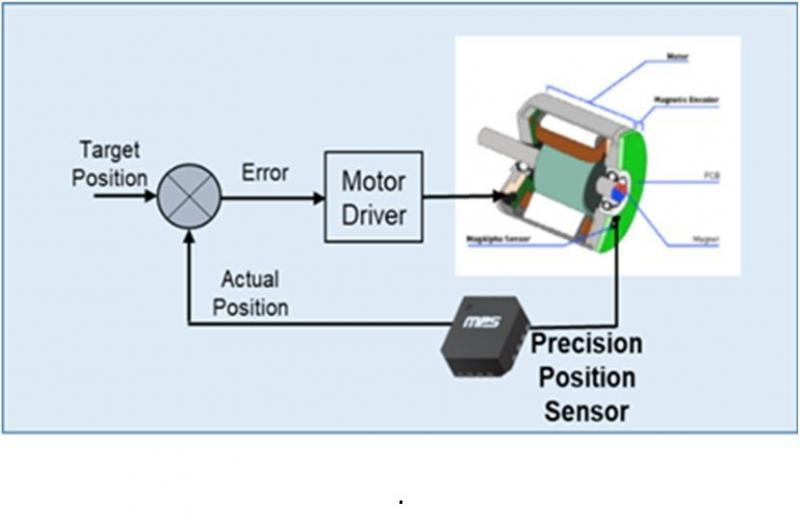
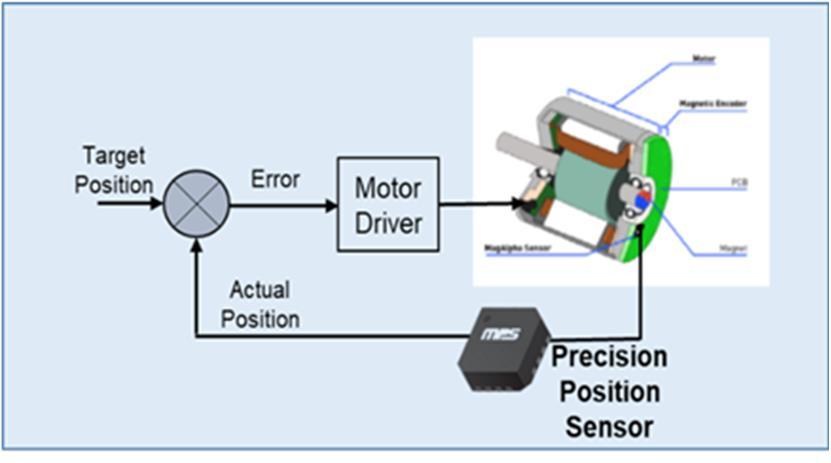
Pokud je vyžadováno vysoké rozlišení, stejně jako šířka pásma, nebo je zapotřebí mimořádné nízká INL, třeba pod 0,1°, může skvělou rovnováhu mezi vlastnostmi a cenou nabídnout speciální řešení, jako je MA600 – viz také obr. 2. MA600 zajišťuje větší šířku pásma i rozlišení než v případě návrhů založených na Hallově jevu, zatímco dále bude i výrazně levnější než další nejvhodnější alternativa – optický enkodér. Vzhledem k tomu, že MA600 staví na principech TMR (tunneling magneto-resistance), vykazuje mnohem nižší rušení než je tomu v případě řešení založených na Hallově jevu. Šum v případě MA600 navíc nebude mít Gaussův profil, na rozdíl od tradičních Hallových prvků. Zmíněné činitele pak výraznou měrou zmenšují kompromisy spojované u TMR se šířkou pásma.
Stanovujeme přesnost a rozlišení
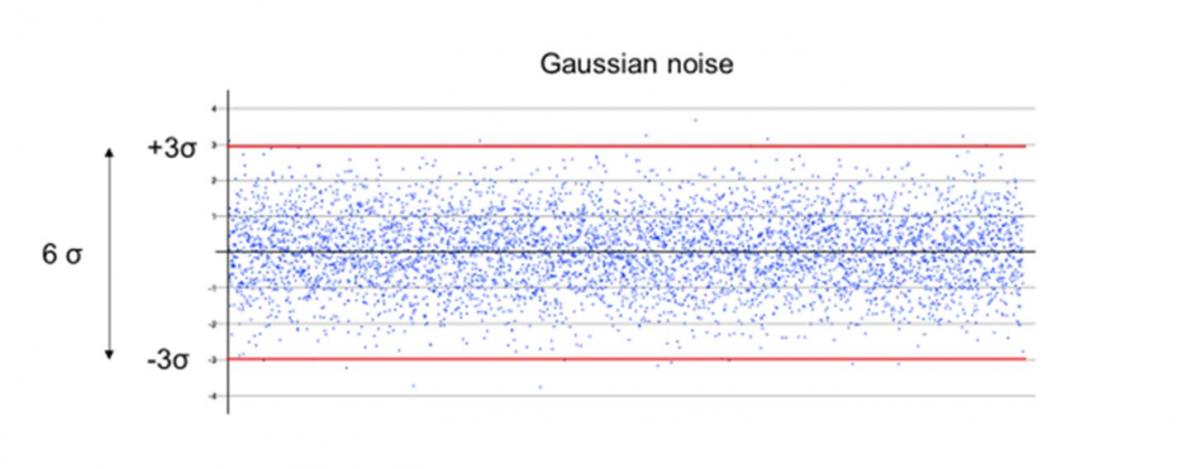
Dokumentace od výrobce přináší podrobné informace nejen o specifické přesnosti snímače a jeho rozlišení, ale i dalších klíčových parametrech, jako jsou provozní teplotní rozsah, napájecí napětí, klidový odběr nebo rozsah intenzit magnetického pole. Datasheety ale nejsou pokaždé vytvářeny jednotným způsobem, takže je specifikace nutné pečlivě porovnávat. Někteří výrobci např. stanovují rozlišení v závislosti na rozsahu šumu 1σ, takže lze minimální změnu úhlu detekovat pouze po dobu vyjádřenou 68 procenty. MPS na druhou stranu specifikuje rozlišení s ohledem na úroveň šumu ±3σ, viz obr. 3. To pak zaručuje, že zjištěný rozdíl mezi dvěma úhly bude správný po dobu 99,7 %. Všichni výrobci ale nejsou tak konzervativní. Při ignorování požadavku na 3σ je tudíž jednoduché zajistit, aby se rozlišení zdálo vyšší.
Přesnost, nebo též INL, je na druhou stranu docela přímočará a budeme zde mít i menší manévrovací prostor k maskování skutečných vlastností snímače. Bude však zapotřebí počítat s teplotním rozsahem, pro který máme parametry definované. Jak už bylo zmíněno výše, kalibrace dokáže potlačit INL vytvářenou mechanickými nebo magnetickými tolerancemi. Kalibrovat ve snaze potlačit teplotní drift ale znamená mnohem větší komplikace.
Závěr
Volba správného magnetického senzoru polohy pro danou aplikaci znamená pochopit spletité kompromisy mezi dosahovanou přesností, rozlišením a také dalšími parametry systému. Rovněž je nutné chápat, jak lze takové parametry optimalizovat a získat přitom nejlepší možné výsledky. Jestliže vývojáři rozumí klíčovým pojmům, jako je přesnost a rozlišení, a také způsobu, jak se dotýkají magnetických senzorů polohy, např. MA600, mohou při výběru čidel do svých systémů učinit kvalifikovaná rozhodnutí. Zmíněné znalosti pak pomohou při optimalizaci vlastností, zatímco máme pod kontrolou náklady a zajišťujeme i náležitou funkci daných návrhů. Ve stále se rozvíjejícím světě technologií, kde rozhoduje preciznost či přesnost, bude pochopení drobných rozdílů v případě magnetických snímačů polohy nedocenitelné. Vývojáři vybavení takovými znalostmi jsou pak ještě lépe připraveni popasovat se s nástrahami digitálního světa a využít plný potenciál magnetických senzorů polohy v celé řadě aplikací.
Podrobnosti o čipu naleznete na: https://www.monolithicpower.com/en/ma600.html
Pro více informací kontaktujte distributora Codico (www.codico.com): Petr.Rocek@codico.com. Zde také můžete směřovat veškeré své dotazy.



